TUM¶
约 1260 个字 3 张图片 预计阅读时间 4 分钟
Abstract
TUM RGB-D 数据集由在不同的室内场景使用 Microsoft Kinect 传感器记录的 39 个序列组成,包含了
- Testing and Debugging(测试)
- Handheld SLAM(手持 SLAM)
- Robot SLAM(机器人 SLAM)
- Structure vs. Texture(结构 vs 低纹理)
- Dynamic Objects(动态物体)
- 3D Object Reconstruction(三维物体重建)
- Validation Files(验证集)
- Calibration Files(标定文件)
等几种针对不同任务的数据集,每个种类有包含多个数据,可以用于多种任务的性能测试。其中之后验证集没有真值,只能通过 TUM 提供的在线测试工具评测我们的计算结果。TUM 数据集带有标准的轨迹和一些比较工具,所以非常适合用来做研究。
数据集格式 ¶
ros bag¶
可用 ros 的 rosbag 命令进行播放,相应节点订阅图像话题即可。
tgz¶
压缩后包含:
- rgb.txt 和 depth.txt 文件记录了各文件的采集时间和对应的文件名
- rgb/ 和 depth/ 目录存放采集到的 png 格式图像文件,以采集时间命名
- groundtruth.txt 为外部运动捕捉系统采集到的相机位姿,格式为(time, tx, ty, tz, qx, qy, qw)
Note
- 彩色图、深度图和标准轨迹的采集都是独立的,轨迹的采集频率比图像高很多。
- 在使用数据之前,需要根据采集时间,对数据进行一次时间上的对齐,以便对彩色图和深度图进行配对。
- 可以把采集时间相近于一个阈值的数据,看成是一对图像,并把相近时间的位姿,看作是该图像的真实采集位置。
- TUM 提供了 associate.py 程序,将其放入目录下执行即可得到记录彩色图像与深度图像匹配结果的 accelerometer.txt 文件,里面记录了彩色图像与深度图像的匹配关系。
动态数据集 ¶
研究动态 SALM 时用的是 TUM 的 Dynamic Objects 数据集(9 个)以及 Validation Files 对应的部分,如下图所示:
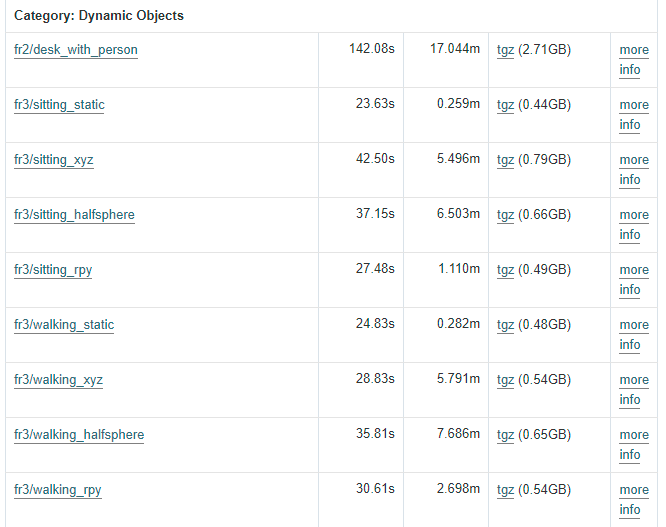
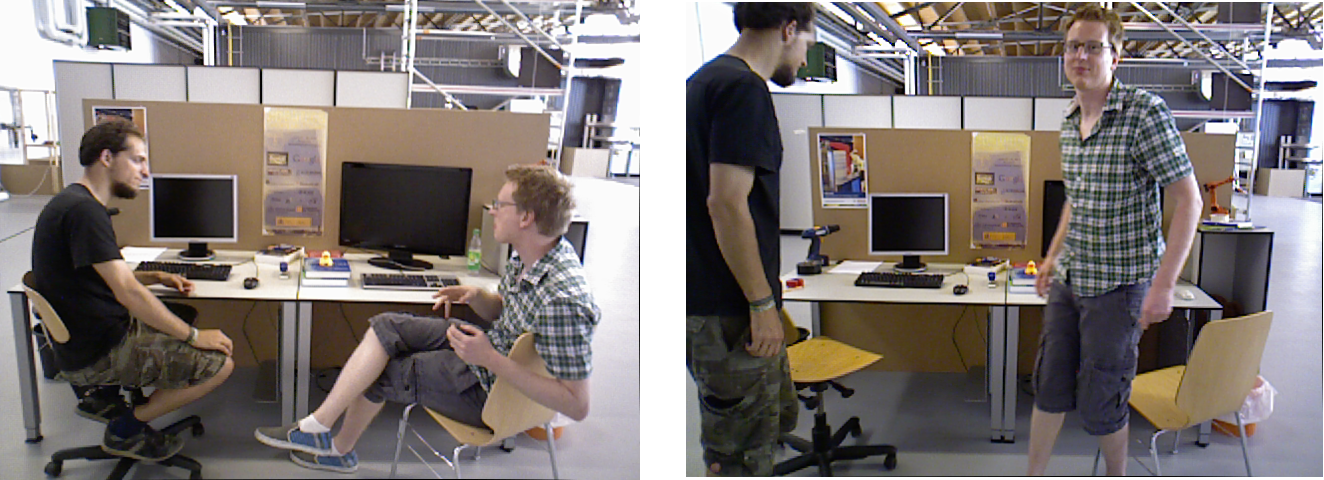
- fr2/desk_with_person 记录了一个人坐在办公桌前的典型办公室场景,在录制过程中,该人移动并与一些物体(屏幕、电话等)互动。
- 对于其他 8 个序列,sitting 类别的序列中两个人坐在办公桌前,交谈,并稍微打手势,序列旨在评估视觉 SLAM 和里程计算法对缓慢移动的动态对象的鲁棒性;walking 类别的序列中两个人走过一个办公室场景,旨在评估视觉 SLAM 在大部分可见场景中快速移动动态对象的鲁棒性。xyz,rpy,halfsphere,static 则对应了相机的移动方式。具体的 sitting 与 walking 数据集中的区别如下:
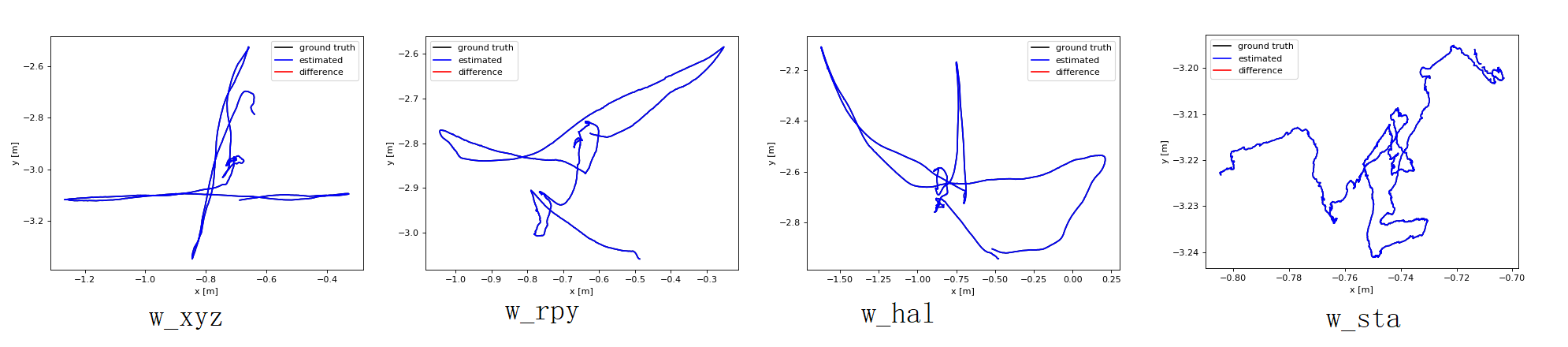
相机运动轨迹的区别如下:
数据集分析 ¶
对于动态环境下的 SLAM 问题,我们通常遵循以下两个准则来降低动态物体对定位精度的影响。
- 准则 1:尽可能将运动的物体(区域)的去除。运动区域的特征点会引入一些错误的空间约束,极大的降低定位的精度及鲁棒性,因此对动态区域的容忍度是非常低的。
- 准则 2:尽可能保留静态区域。如果场景中使用的特征点过少,也会间接降低定位的精度,所以在剔除动态区域的同时,尽量不要把静态点当做动态点去除掉。
在使用语义信息剔除动态区域的时候要考虑的问题:
- 先验知识里静止的物体(比如椅子,书)可能是运动的,如果一个人推着椅子运动的话也需要将椅子区域的特征点进行剔除,否则定位时也会使用一些动态的不安全的特征点,即违背了准则 1
- 先验知识里移动的物体(比如人和汽车)可能是静止的,如果这些区域去掉的话,会因为静态点的减少而降低定位精度,即违反了准则 2。
- 一些物体可能是缓慢运动的。一些论文常常使用两帧之间计算外点,通过物体上外点的数量判断物体是否在移动,然而如果物体是在缓慢运动,那么很难在前后两帧图像之间通过外点的方式检测出来,即违背了准则 1。
- 一些物体可能是局部运动局部静止的。比如 TUM 数据集中 sitting 中的部分,人的大部分区域在静止的,但是有一小部分是动态的,不能将人作为一个整体进行运动判断,也就不能同时满足准则 1 与准则 2。
针对 TUM 数据集,具体需要考虑的因素包括:
- walking 中移动的人
- sitting 中局部运动的人
- 静止的人
- 移动的椅子和书籍