NID-SLAM¶
约 344 个字 预计阅读时间 1 分钟
 NID-SLAM: Neural Implicit Representation-based RGB-D SLAM In Dynamic Environments
NID-SLAM: Neural Implicit Representation-based RGB-D SLAM In Dynamic EnvironmentsIdea¶
- 神经隐式 SLAM + 动态环境
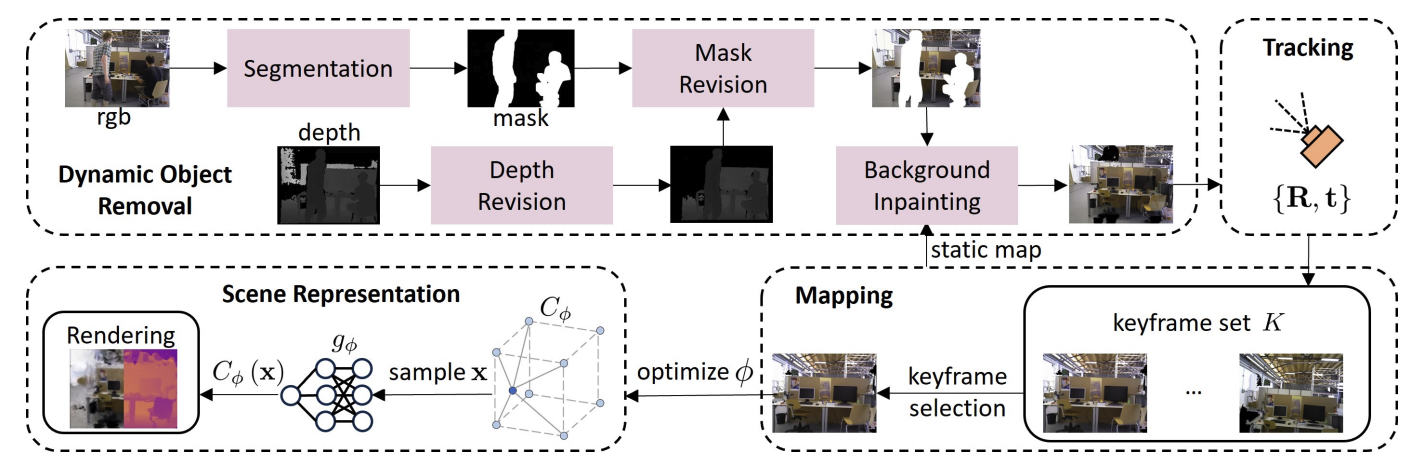
- 动态物体去除:
- 深度修正:计算深度图的图像梯度,当图像的水平或垂直梯度超过阈值时,将梯度方向上后续像素点的深度置为 0
- 基于深度的语义分割:采用基于边界框的网络(YOLO)进行输入图像的语义分割,输出为潜在动态或可移动物体的二进制掩码
- 背景修复:使用以前的视点获得的静态信息修复被遮挡的背景
- 关键帧选择策略:两种选择策略
- 动态物体比率较低的帧(覆盖策略
) :倾向于覆盖最大场景区域的帧,确保场景边缘区域的全面优化) - 当前帧与前一关键帧重叠率较低的帧(重叠策略
) :倾向于从与当前帧视觉上重叠的关键帧随机选择 - 两个比率的加权和小于阈值则插入关键帧集合
- 静态场景默认使用重叠策略
- 为避免过度关注边缘区域并反复优化相同区域,我们首先使用基于覆盖的策略优化整个场景,然后多次使用基于重叠的策略,重复多次
- 动态物体比率较低的帧(覆盖策略
- 场景表示和图形渲染
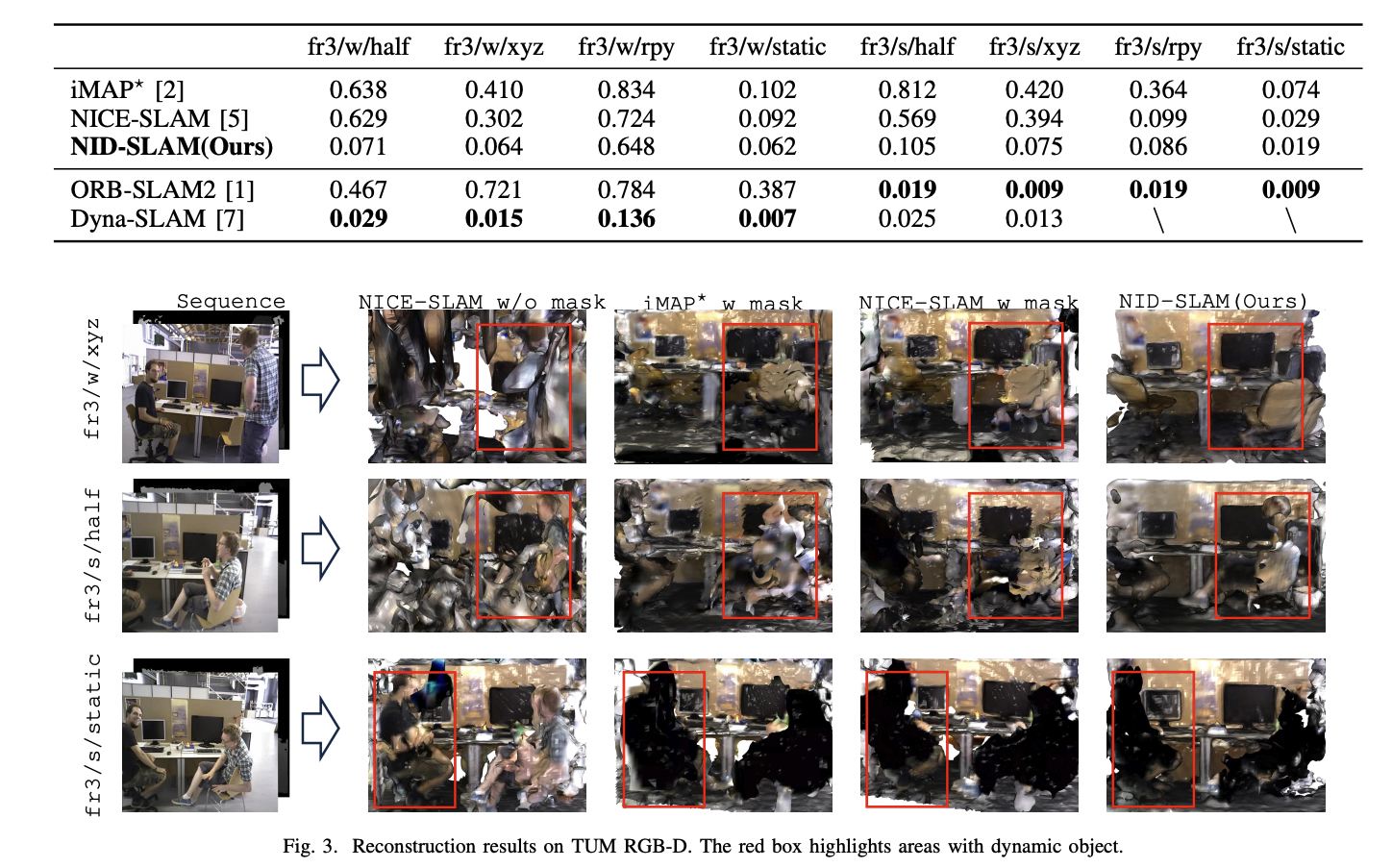
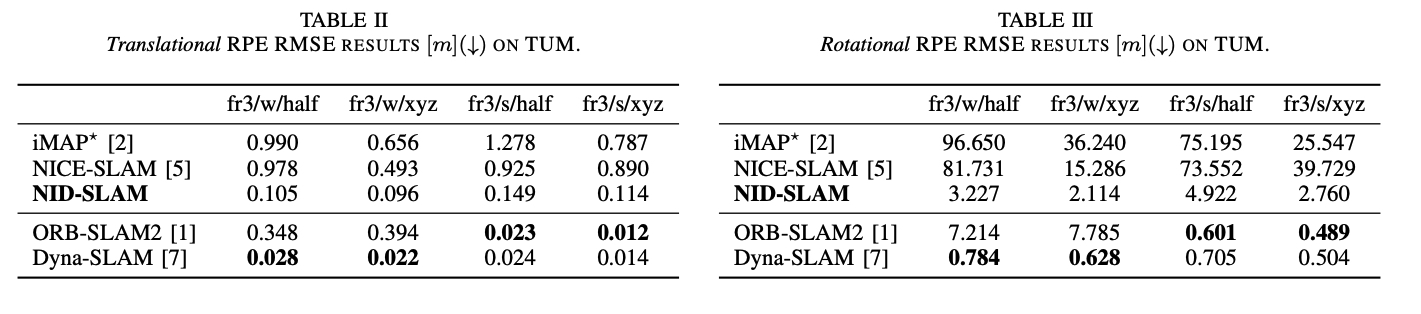
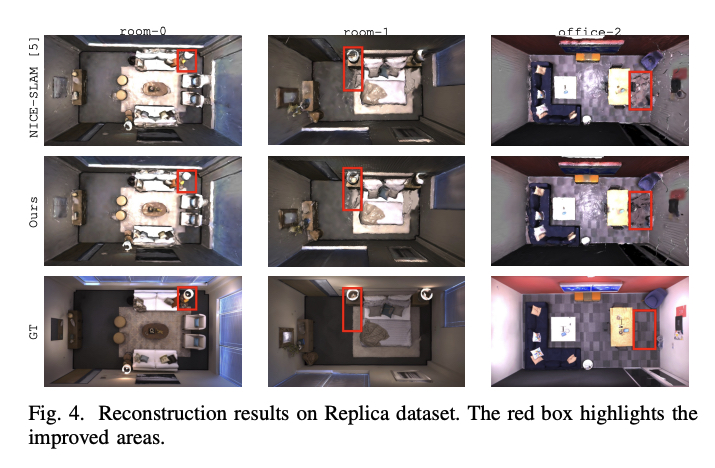
Experiments¶
最后更新:
2024年7月29日 11:42:34
创建日期: 2024年7月29日 11:42:34
创建日期: 2024年7月29日 11:42:34