COLMAP¶
约 475 个字 67 行代码 2 张图片 预计阅读时间 2 分钟
Abstract
- COLMAP 是一种通用的运动结构 (SfM) 和多视图立体 (MVS) 管道,具有图形和命令行界面。
- 以下的实验环境:Ubuntu 20.04(宿主机
) 、Docker 11.8.0-cudnn8-devel-ubuntu22.04(镜像) 、CUDA 11.8
Installation¶
Dependencies¶
sudo apt-get install \
git \
cmake \
ninja-build \
build-essential \
libboost-program-options-dev \
libboost-filesystem-dev \
libboost-graph-dev \
libboost-system-dev \
libeigen3-dev \
libflann-dev \
libfreeimage-dev \
libmetis-dev \
libgoogle-glog-dev \
libgtest-dev \
libgmock-dev \
libsqlite3-dev \
libglew-dev \
qtbase5-dev \
libqt5opengl5-dev \
libcgal-dev \
libceres-dev
支持 CUDA(宿主机里
Configure and Compile¶
git clone https://github.com/colmap/colmap.git
cd colmap
mkdir build
cd build
cmake .. -GNinja
ninja
sudo ninja install
nvcc fatal : unsupported gpu architecture ‘compute_native’
Experiment¶
- 启动
COLMAP
- 点击
Reconstruction > Automatic Reconstruction进行一系列基本设置后,输出的结果会写在workspace folder中(如果图像在path/to/project/images中,那么就应该选择path/to/project作为workspace)
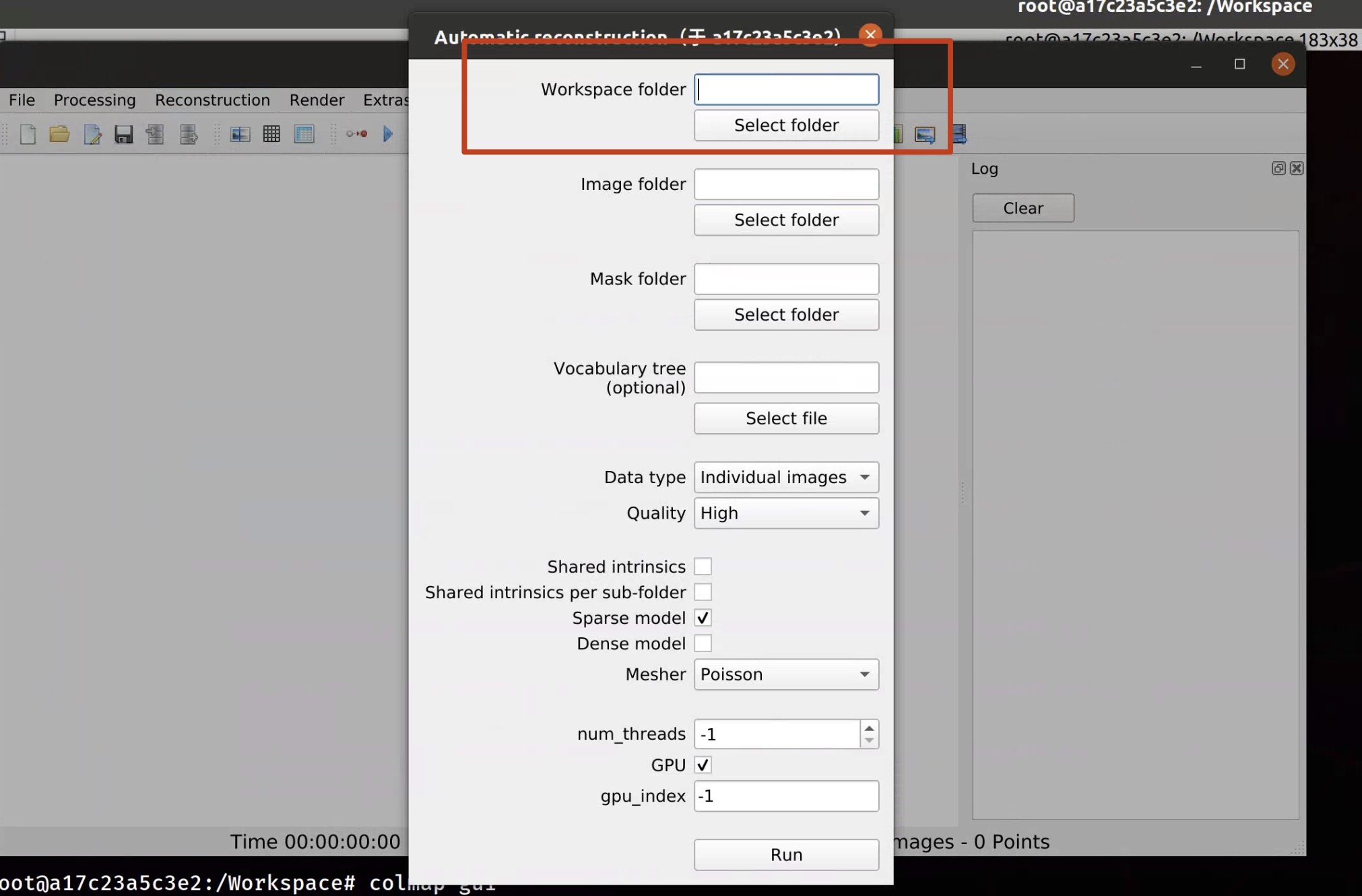
- 运行
Automatic Reconstruction后,文件夹生成为
+── images
│ +── image1.jpg
│ +── image2.jpg
│ +── ...
+── sparse
│ +── 0
│ │ +── cameras.bin
│ │ +── images.bin
│ │ +── points3D.bin
│ +── ...
+── dense
│ +── 0
│ │ +── images
│ │ +── sparse
│ │ +── stereo
│ │ +── fused.ply
│ │ +── meshed-poisson.ply
│ │ +── meshed-delaunay.ply
│ +── ...
+── database.db
文件夹作用
path/to/project/sparse:重建得到的稀疏模型path/to/project/dense:重建得到的稠密模型fused.ply:可以加载到 COLMAP 图形界面,从File > Import model from ...- 稠密的网格只能用外部查看器(
MeshLab)可视化
生成的文件夹不能直接用于 NGP 或 3DGS
3DGS
在 3DGS 中,有脚本转换
将图片打包成如下再执行脚本
如果是视频,先用 ffmpeg 抽帧
Picture Capture Process¶
- 拍摄的图片应具有丰富的纹理。最好避免纹理特别少的图片如一张白墙或空桌图片。通过加入一些物品来丰富纹理
- 具备相似的光照情况。避免
high dynamic range scenes(如有太阳有影子,穿过门或窗拍摄) 。避免镜面反射 - 具有高度视觉重叠的图片。确保一个物体至少有三张图片,尽量多一点
- 多视图拍摄。不要通过平移旋转相机来从同一个方向拍摄。但确保相似视角有少且精的图片,并不是越多越好。如果是视频,请减少帧率。
Reference¶
- Installation — COLMAP 3.11.0.dev0 documentation
- 实验笔记之——Linux 实现 COLMAP_linux colmap-CSDN 博客
- ColMap 使用 | 悠闲の小屋
- 三维重建 instant-ngp 环境部署与 colmap、ffmpeg 的脚本参数使用 - lefree - 博客园