4DGaussians¶
约 1368 个字 5 张图片 预计阅读时间 5 分钟
Abstract
 4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
4D Gaussian Splatting for Real-Time Dynamic Scene RenderingIdea¶
Introduction¶
- 3DGS 只能在静态场景重建,如果发生运动,则需要考虑时间维度的信息,把 3DGS 的思想放到对动态空间的建模上
- 最简单的想法就是在每一个时间点上单独建立一个 3DGS 模型,将一段时间上所有的 3DGS 模型组合起来就是一个 4DGS 模型,但这样会代码存储空间爆炸的问题
- 4DGS 的创新点在于,在 3DGS 的基础上,引入变形场 (deformation field) 来表示 Gaussians 的运动和形变,包括一个多分辨率特征平面和一个轻量级 MLP,简单地说,将动态场景看作是一个静态场景在时间维度上的变形
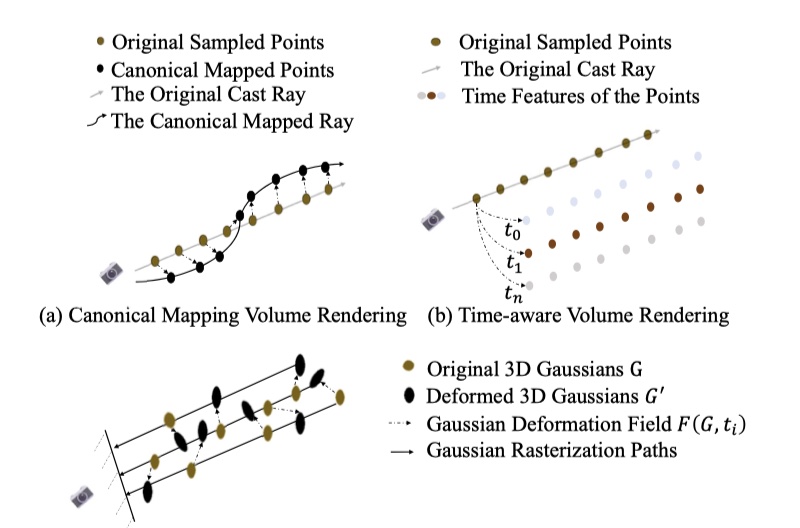
- 在每个时间戳,变形场会将 Gaussians 转换到一个具体新形状的新位置,该变换相当于 Gaussian 的运动和形变(从始至终只维护一组 3DGS 模型,即只有一组 3D 高斯球,只是在不同的时间节点,高斯球会做出相应的变换)
- 4DGS 模型中,将一个点的 \((x,y,z,t)\) 坐标先代入一个时空结构编码器,随后输出带入一个多头的高斯变形解码器进行解码,得到 \((x,y,z,r,s)\) 的变形值,与原值相加后,按照 3DGS 的方法得到不透明度和 SH 系数进行渲染
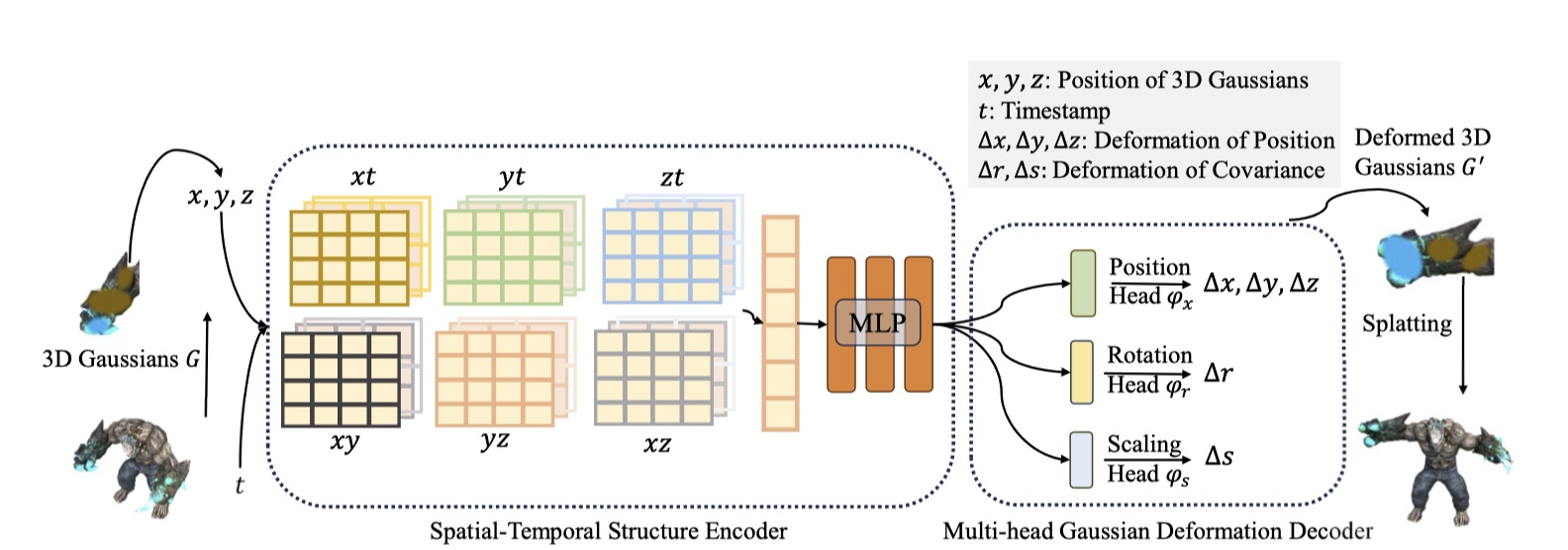
4D Gaussian Splatting Framework¶
参数说明
- 旋转矩阵 \(M = [R, T]\)
- 时间戳 \(t\)
- 3D 高斯 \(\mathcal{G}\)
- 高斯变形场网络 \(\mathcal{F}\)
- 泼溅方法 \(\mathcal{S}\)
- 3D 高斯变形场变化量 \(\Delta \mathcal{G} = \mathcal{F}(\mathcal{G}, t)\)
- 时空结构编码器 \(\mathcal{H}\),将 3D 高斯编码 \(f_d = \mathcal{H} = (\mathcal{G}, t)\)
- 多头高斯变形解码器 \(\mathcal{D}\),将 \(\Delta \mathcal{G}\) 解码 \(\Delta \mathcal{G} = \mathcal{D}(f)\)
- 从原始 3D 高斯 \(\mathcal{G}\) 转换到一个时间戳的新的 \(\mathcal{G}^\prime = \Delta \mathcal{G} + \mathcal{G}\)
- 新视角图像 \(\hat{I} = \mathcal{S}(M, \mathcal{G}^\prime)\)
Gaussian Deformation Field Network¶
Spatial-Temporal Structure Encoder¶
灵感来源
- 参考 CVPR 2023 HexPlane 和 K-Planes 中有关时空结构张量分解的思想,最开始是在 3D NeRF 中 论文 TensoRF 出现,收到张量 CP/VM 分解公式的启发,率先提出将 3D 空间张量分解成多个秩 1 张量,建立了一个显式的模型来表征 3D 空间,将每个秩 1 张量作为待优化的变量,通过反向传播进行优化,提高了模型训练速度与推理速度
- HexPlane 提出了一个 4D 空间张量辐射场,简单理解就是把一个 \((x,y,z,t)\) 四维张量看作 \((xy, zt, yz, xt, zx, yt\)) 这六个二维张量的组合,采用类似张量 VM 分解的方式来组合
- K-Planes 也是相同的思想,差别在于这六个二维张量的组合形式,采用类似 Hadamard 积来组合
- HexPlane 和 K-Planes 利用 4D 空间张量场对空间信息进行编码,随后利用多头解码器解码出不透明度和颜色,然后用 NeRF 的体积射线法渲染图像
- 与 HexPlane 和 K-Planes 不同的是,4DGS 接下来通过一个由多头高斯变形解码器将时空结构编码信息分别解码成 \((x,y,z,r,s)\) 的变形值,而不是解码成不透明度和颜色,转而用 3DGS 的方法进行处理
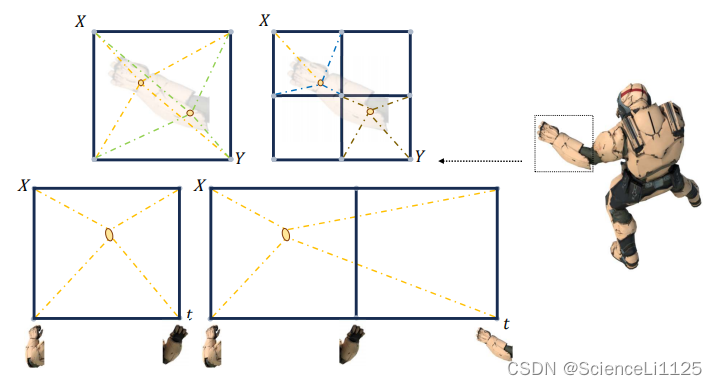
- 如上图所示,空间相邻的高斯在运动和形变上具有相似的特征,同一个高斯在相邻时间也会呈现相似的变化特征,并且相隔较远的高斯之间也会具有一定的关联。
- 因此 4DGS 采用多分辨率特征平面体素网格模块对单元体素中的每个高斯的空间和时间进行编码
- \(\mathcal{H}\) 包括六个多分辨率平面模块 \(R_l(i,j)\) 和一个小型 MLP \(\phi_d\)
- \(\{R_l(i,j), \phi_d | (i,j) \in \{ (x,y),(x,z),(y,z),(x,t),(y,t),(z,t)\}, l \in \{1, 2 \} \}\),\(\mu = (x,y,z)\) 是 3D 高斯的平均值
- 计算体素特征:
\[
f_h=\bigcup_l\prod\text{interp}(R_l(i,j))
\]
- \(f_h\) 是神经体素特征,利用双线性插值对附近的四个查询体素特征进行插值
- 随后用 MLP 将所有原始特征进行解码 \(f_d = \phi_d(f_h)\)
Multi-Head Gaussian Deformation Decoder¶
- 设计多头高斯变形解码器 \(\mathcal{D} = \{ \phi_x, \phi_r, \phi_s \}\)
- 用 MLP 分别预测变形量
- 高斯球位移变化量 \(\Delta \mathcal{X} = \phi_x(f_d)\)
- 高斯球旋转四元数变化量 \(\Delta r = \phi_r(f_d)\)
- 高斯球缩放因子变化量 \(\Delta s = \phi_s(f_d)\)
- 变形后的特征表示为 \((\mathcal{X}^\prime, r^\prime, s^\prime) = (\mathcal{X} + \Delta \mathcal{X}, r + \Delta r, s + \Delta s)\)
- 最后获得出高斯球动态变化后的新形状新位置 \(\mathcal{G}^\prime = \{ \mathcal{X}^\prime, s^\prime, r^\prime, \sigma, \mathcal{C} \}\)
Optimization¶
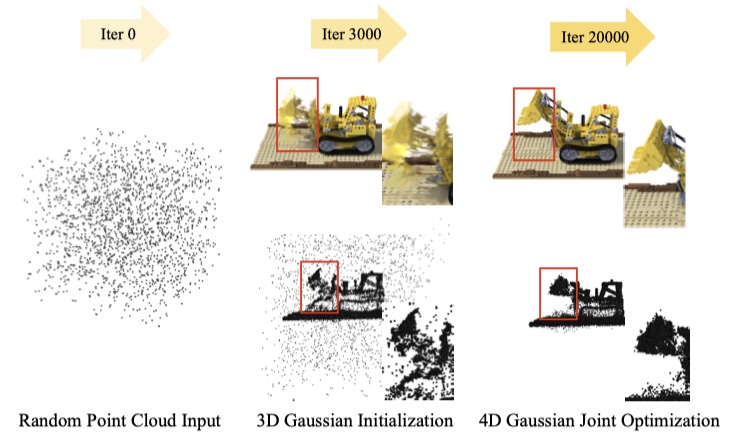
3D Gaussian Initialization¶
- 采取了两阶段训练策略:静态场景初始化和变形场微调;
- 初始化阶段:主要优化静态场景的表示,即只优化 3D Gaussians 的参数;
- 微调阶段:主要学习变形场的表示,即优化多分辨率神经体素和 MLP;
Loss Function¶
- 使用 \(L_1\) 颜色损失和基于网格的 TV 损失 \(\mathcal{L}_{tv}\) 监督训练
\[
\mathcal{L} = \left | \hat{I} - I \right | + \mathcal{L}_{tv}
\]
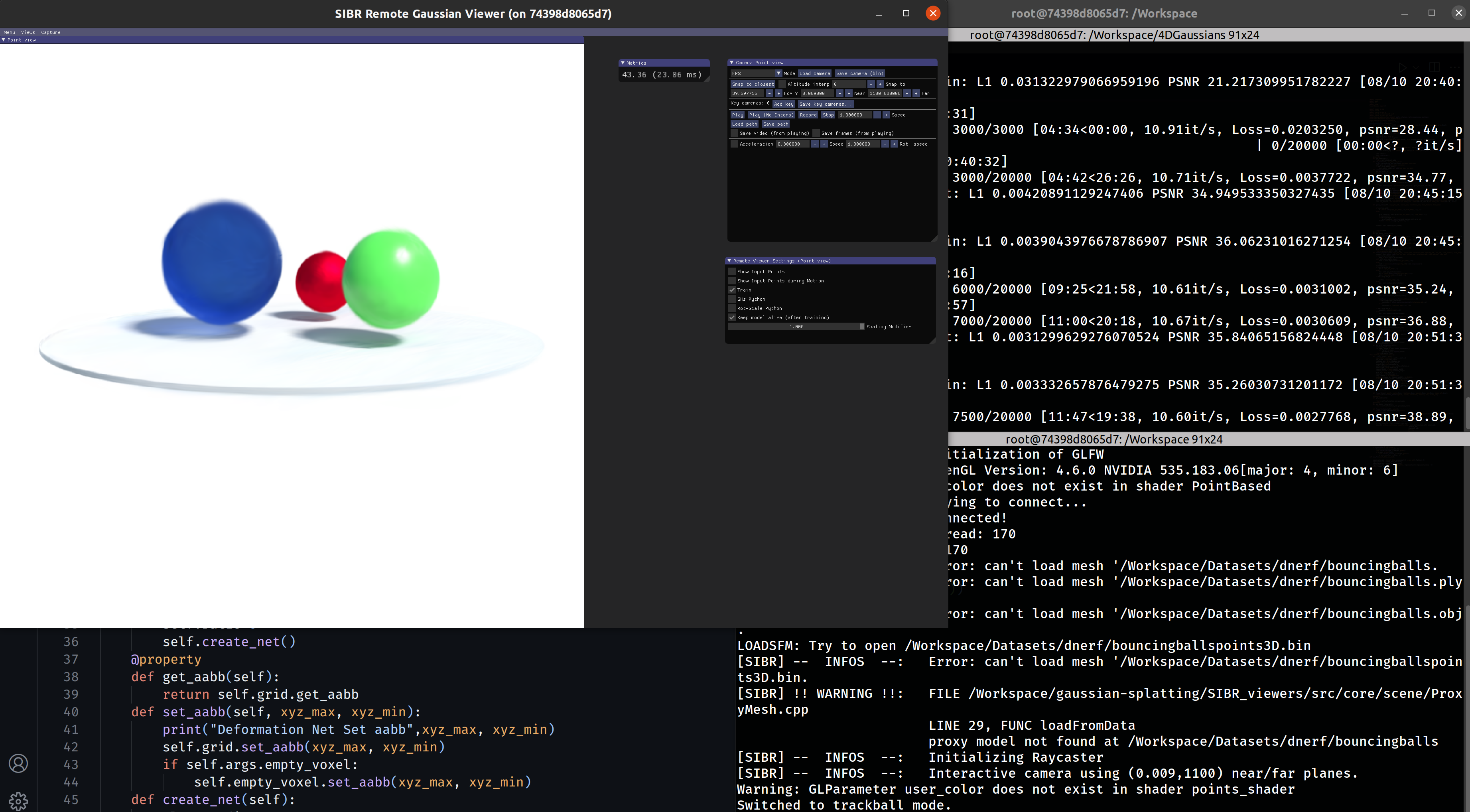
Experiments¶
Reference¶
- https://blog.csdn.net/m0_51976564/article/details/134595401
- https://zhuanlan.zhihu.com/p/663337795
- https://blog.csdn.net/weixin_71780622/article/details/136063893
- https://blog.csdn.net/m0_55605361/article/details/141122450