Gaussian Splatting SLAM¶
约 926 个字 预计阅读时间 3 分钟
Abstract
- paper:
 Gaussian Splatting SLAM
Gaussian Splatting SLAM - code: MonoGS
- video:
 MonoGS
MonoGS
Idea¶
Introduction¶
- 第一个近实时 SLAM 系统,以 3DGS 作为唯一的底层场景表示,可以处理单目输入。
- SLAM 框架内的新技术,包括用于直接相机姿态估计的李群上的解析雅可比矩阵、高斯形状的各向同性正则化和几何验证
- 关键帧选取策略、Gaussian 的增加和删除策略
Gaussian Representation
用一组各向异性的高斯 \(\mathcal{G}\) 映射场景 每个高斯值只有 8 个参数(RGB 3 个、中心位置 3 个、半径 1 个、不透明度 1 个)
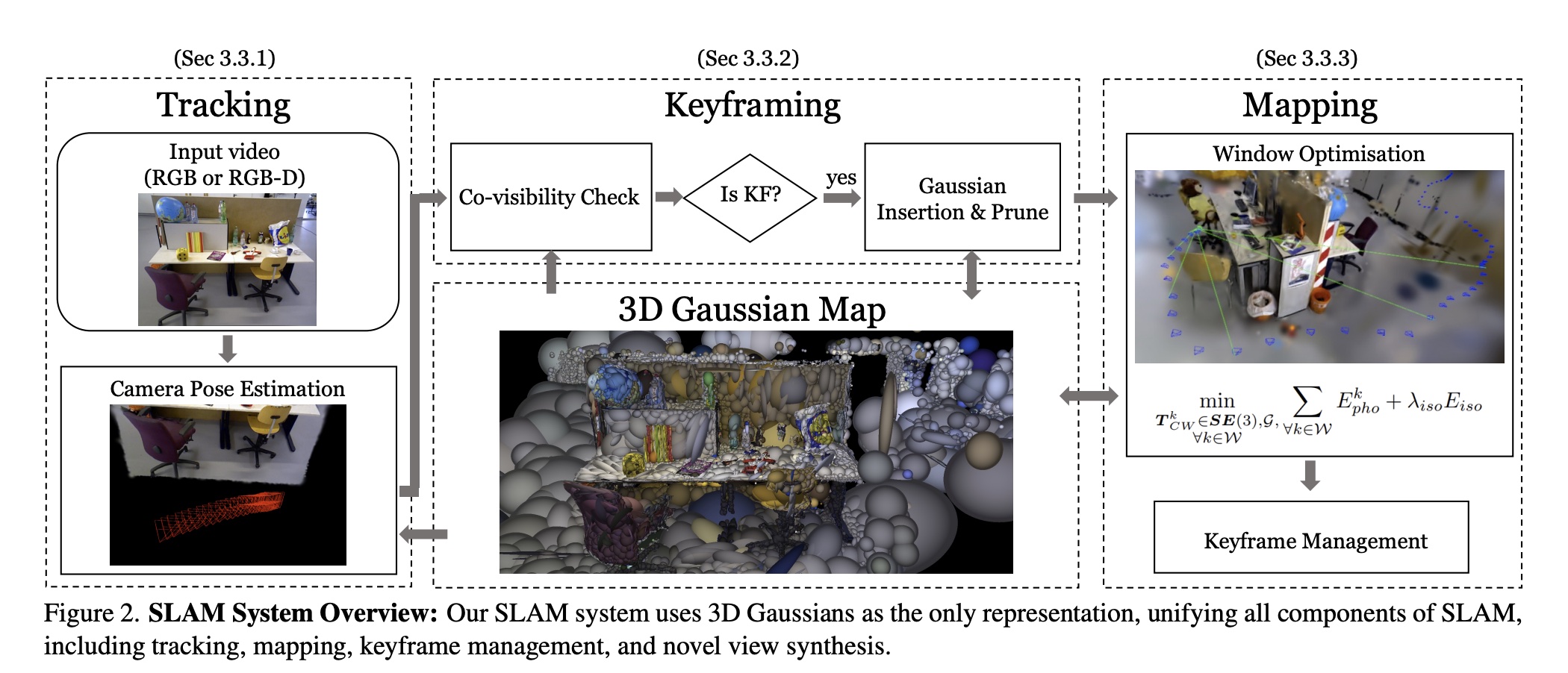
Tracking¶
- 估计相机外参 , 最小化以下目标函数
\[
\begin{aligned}
E_{pho}=\left\|I(\mathcal{G},\boldsymbol{T}_{CW})-\bar{I}\right\|_{1}\\
E_{geo}=\left\|D(\mathcal{G},\boldsymbol{T}_{CW})-\bar{D}\right\|_{1} \\
\min \lambda_{pho} E_{pho} + (1 - \lambda_{pho})E_{geo}
\end{aligned}
\]
parameters
- \(\lambda_{pho}\) 权重超参数
- \(I(\mathcal{G},\boldsymbol{T}_{CW})\) 表示从外参为 \(\boldsymbol{T}_{CW}\) 的相机渲染高斯集合 \(\mathcal{G}\) 所得的图片
- \(\bar{I}\) 真实图片
- \(E_{pho}\) 图片误差
- \(E_{geo}\) 深度误差 , 仅在深度信息可用时引入
- \(D(\mathcal{G},\boldsymbol{T}_{CW})\) 渲染出来的深度(渲染方式和 RGB 值类似 , 均为按不透明度和透光率加权平均)
- \(\bar{D}\) 深度数据
Keyframing¶
- 选取关键帧窗口 \(\mathcal{W}_k\), 两帧之间共同可见 Gaussian 的比例
- 判断 Gaussian 是否可见的方法就是判断到该 Gaussian 的透光率是否达到 0.5
- 定义共同可见度(covisibility)为当前帧 \(i\) 与上一关键帧 \(j\) 之间可见 Gaussian 集合的 IoU
- 若 covisibility 低于某个阈值,或相对平移 \(t_{ij}\) 相对于深度中位数较大,则帧 \(i\) 被视为关键帧
- 同时在当前帧 \(i\) 被加入到关键帧窗口时,也要移除 \(\mathcal{W}_k\) 中老旧的关键帧
- 当帧 \(j \in \mathcal{W}_k\) 与当前帧 \(i\) 可见 Gaussians 的重叠系数 OC 小于某个阈值时,移除。
\[
OC_{cov}(i,j)=\frac{|\mathcal{G}_i^v\cap\mathcal{G}_j^v|}{\min(|\mathcal{G}_i^v|,|\mathcal{G}_j^v|)}
\]
Gaussian Insertion and Pruning¶
- 每个关键帧都会添加新的 Gaussians,用关键帧的每个像素点的深度 D(在单目相机的情况下会渲染深度来估计 D 的值)作为新增 Gaussians 的参考位置
- 由于 D 不一定准确,新的 Gaussians 的深度服从一个均值为 D、方差较小的正太分布
- 对于没有深度估计的像素,新 Gaussians 的深度服从均值为渲染图像深度中位数、方差较大的正太分布
- 一开始没有 Gaussian 时,新增 Gaussian 的位置是随机的
- 当关键帧窗口 \(\mathcal{W}_k\) 已满,执行剪枝操作,如果最近三个关键帧那新增的 Gaussians 没有在其他至少三帧内观察到,移除。不透明度小于 0.7 的 Gaussians 也会被移除。
Mapping¶
- 维护一个协调的 3D 结构并优化新插入的 Gaussians
- 参与优化的帧集合为 \(\mathcal{W}=\mathcal{W}_k \cup \mathcal{W}_r\),其中 \(\mathcal{W}_r\) 是随机选取的两个旧帧
- 3D 高斯渲染过程中没有对沿光线方向的 Gaussian 进行约束,会导致 SLAM 过程中出现伪影,因此引入各向同性约束
\[
E_{iso}=\sum_{i=1}^{|\mathcal{G}|}\left\|\mathbf{s}_i-\tilde{\mathbf{s}_i}\cdot\mathbf{1}\right\|_1
\]
- 对于建图部分,最小化以下目标函数
\[
\min_{\boldsymbol{T}_{CW_{\forall k\in\mathcal{W}}}^k\in\mathbf{SE}{(3),\mathcal{G}}}\sum_{\forall k\in\mathcal{W}}E_{pho}^k+\lambda_{iso}E_{iso}
\]
Experiments¶
Reference¶
- 【计算机视觉】四篇基于 Gaussian Splatting 的 SLAM 论文对比 _gaussian splatting slam-CSDN 博客
- 学习笔记之——3DGS-SLAM 系列代码解读 _gs slam-CSDN 博客
最后更新:
2025年5月9日 15:51:31
创建日期: 2024年10月13日 15:51:16
创建日期: 2024年10月13日 15:51:16