LoopSplat¶
约 1026 个字 1 张图片 预计阅读时间 3 分钟
Abstract
 LoopSplat: Loop Closure by Registering 3D Gaussian Splats
LoopSplat: Loop Closure by Registering 3D Gaussian SplatsIntroduction¶
问题导向
3DGS 未能通过 loop closure / global BA 解决场景全局一致性问题。
解决方案
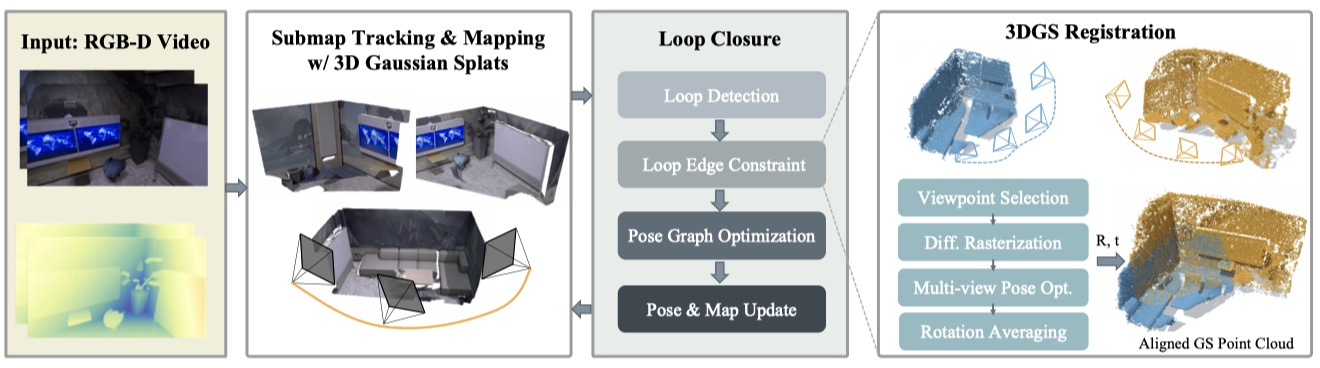
LoopSplat 以 RGB-D 作为输入,利用 3DGS 子地图和帧到模型跟踪进行 dense mapping。
- LoopSplat 在线触发 loop closure,并通过 3DGS 配准直接计算子地图之间的相对回环边约束,与传统的全局到局部点云配准相比,提高了效率和准确性。
- 采用一种鲁棒的位姿图优化公式,并对各子地图进行刚性对齐以实现全局一致性。
Method¶
GS SLAM¶
- Submap Initialization:每个子地图对观察特定区域的一系列 keyframe 进行建模。随着场景扩大,会初始化新的 submap,与使用固定数量 keyframe 的方法不同,当当前帧相对于第一个 keyframe 的相对位移和旋转超过 thre,会触发新的 submap initialization;
- Frame-to-model Tracking:基于恒定运动假设初始化位姿,通过最小化 tracking loss 优化位姿;
- Submap Expansion:submap 按固定时间选择 keyframe。点当前 keyframe 被定位,主要在覆盖稀疏的区域扩展 3D Gaussian map。从 RGB-D 中计算带 pose 的 dense pc,然后从累积透明度值低于 thre 或出现显著深度差异的区域中均匀采样 \(M_k\) 个点。只有当 radius 内不存在现有的 3D Gaussian mean 时,才将新的 3D Gaussian splats 添加到当前子地图中;
- Submap Update:添加新的高斯后,当前 submap 中的所有高斯通过最小化 render loss 进行固定次数的迭代优化,由 submap 上的所有 keyframe 计算得出;
Registration of Gaussian Splats¶
- Overlap Estimation:作者发现,通过匹配局部特征直接估计高斯重叠区域效果不好,相反,从每个 submap 中识别出具有相似视觉内容的视点。首先将所有 keyframe 通过 NetVLAD [2] 提取它们的全局描述符,然后计算两组 keyframe 之间的 cosine similarity,并保留前 k 对进行配准;
- Registration as Keyframe Localization
- 3DGS submap 以及视点可被视为一个刚体,所以作者将 3DGS 配准视为关键帧定位问题;
- 固定地图参数,最小化 render loss 优化刚体变换;
- 并行估计选定视点的刚体变换,通过从估计的重叠区域中采样前 k 个视点作为选定视点,在不重叠视点处不会出现冗余;
- 首先估计视点变换,然后用于计算 submap 的全局变换;
-
Multi-view Pose Refinement:由于渲染残差表明变换后的视点与原始观测的拟合程度,将残差的倒数作为每个估计值的权重,并应用加权旋转平均来计算全局旋转;
\[ \bar{\mathbf{R}}=\arg\min_{\mathbf{R}\in SO3}\sum_{i=1}^k\frac{1}{\varepsilon_i}\|\mathbf{R}-\mathbf{R}_i\|_F^2+\sum_{i=k+1}^{2k}\frac{1}{\varepsilon_i}\|\mathbf{R}-\mathbf{R}_i^{-1}\|_F^2 \]
Loop Closure with 3DGS¶
- 当创建新的 submap 时会触发 loop closure,构建包含所有历史 submap 的位姿图,然后用 3DGS 配准计算位姿图的回环边约束,最后执行位姿图优化;
- Loop Closure Detection
- 为了检测系统是否访问过同一地点,首先使用预训练的 NetVLAD [2] 提取全局描述符;
- 计算第 i 个 submap 的 all keyframe 的 cosine similarity,确定对于第 p 个百分位数的自相似性分数 \(s_{self}^i\);
- 然后应用相同的方法计算第 i 和 第 j 个 submap 之间的交叉相似性 \(s_{cross}^{i,j}\);
- 如果 \(s_{cross}^{i,j} > \min{s_{self}^i, s_{self}^j}\),则添加一个新的 loop;
- 然后仅依靠视觉相似性进行 loop closure,可能会产生错误的闭环边,因此还评估两个 submap 的高斯之间的初始几何重叠率,保留 \(r>0.2\) 的 loop;
- Pose Graph Optimization:当检测到新的 loop,都会创建一个新的位姿图进行优化位姿矫正;
- Globally Consistent Map Adjustment:从位姿图优化输出的位姿矫正,对于每个子 submap,更新相机 pose、Gaussian mean 说 和 convariances
Experiments¶
Reference¶
- [2] Netvlad: Cnn architecture for weakly supervised place recognition.