Splat-SLAM¶
约 840 个字 1 张图片 预计阅读时间 3 分钟
Abstract
 Splat-SLAM: Globally Optimized RGB-only SLAM with 3D Gaussians
Splat-SLAM: Globally Optimized RGB-only SLAM with 3D GaussiansIntroduction¶
问题导向
3DGS-SLAM 要么不采用全局优化,要么使用单目深度。
解决方案
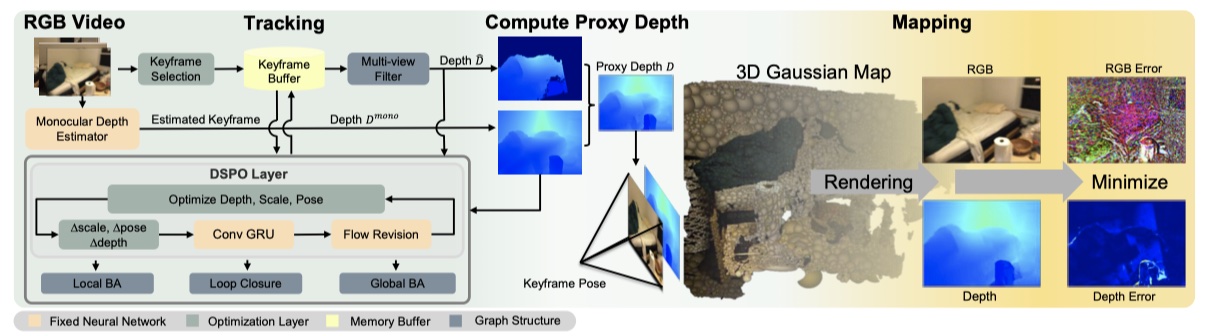
首个采用密集 3D 高斯地图表示的仅 RGB SLAM 系统,通过动态适应关键帧位姿和深度更新,主动使 3D 高斯地图变形,从而利用 globally optimized tracking 的所有优势。此外,用单目深度估计器细化不准确区域的深度更新,可进一步提高 3D 重建的准确性。
Method¶
Tracking¶
目标
为了预测相机运动,使用一个预训练的循环光流模型 RAFT,并结合 Disparity、Scale 和 位姿优化(DSPO)层来联合优化相机位姿和逐像素视差。
- 优化通过 GN 在因子图上进行,V 存储 keyframe 的 pose 和 disp,E 存储 keyframe 之间的 optical flow,通过计算到最后天机的 keyframe's optical flow,将里程计 keyframe edges 添加到图 G 中,如果 average optical flow > \(\tau\)l,则将新的 keyframe 添加到 G 中;local BA、loop closure、global BA 优化的是相同目标,但基于不同结构的因子图;
- DSPO 层由两个交替优化的目标组成:DBA + 引入 mono depth;
- DBA:联合优化 keyframe 的 pose 和 disp,在当前帧的 sliding window 内定义的 local graph 上进行优化;
- 引入 mono depth \(D^{mono}\) 作为额外的数据项,\(D^{mono}\) 由预训练的相对深度 DPT model [12] 预测;
- 计算 keyframe i 和 j 之间的像素对应关系,如果 (u, v) 分别对应的 \(p_i\) 和 \(p_j\) 之间的 L2 距离小于阈值,则估计的 \(D_i(u, v)\) 在 i 和 j 之间是一致的。固定 i,遍历除 i 外的所有 keyframe 计算一致性,数量大于阈值则 \(D_i(u, v)\) 有效;
- Loop Closure:通过计算 curr activate keyframe 与 all prev keyframe 的 average optical flow 实现。对于每对 keyframe,实现两个目标:
- 光流必须低于 thre,确保视图之间有足够的共视性;
- 帧之间的时间间隔必须超过 thre,防止在图中引入冗余边;
- Global BA:构建一个单独的图,包含截止到当前的 all keyframe;
- 引入 [79],根据 keyframe 之间的时间和空间关系引入边;
- 引入 [75],every 20 keyframe 执行一次 global BA;
- 为了保持数值的稳定性,每次 global BA 之前,对 disp 和 pose 的尺度进行归一化;
Deformable 3D Gaussians Scene Representation¶
- 该表示法在 DSPO 或 Loop Closure 下进行变形以实现全局一致性。
- Map Initialization:采用 MonoGS 的 RGBD 策略,将新的高斯添加到未探索的 scene 中,由于没有深度传感器,通过结合内点多视图深度和 mono depth 构建 proxy depth map D;
- Keyframe Selection and optimization:引入 MonoGS 的高斯共视性;
- Map Deformation:由于 tracking 是全局一致的,keyframe 的 pose 和 proxy depth map 的变化需要通过 non-rigid deform 3D 高斯地图;尽管高斯 means 是直接优化的,但随着优化后的 pose 和 proxy depth map 被提供,可以让优化器对地图进行 deform;作者发现,主动对 3D 高斯地图进行变形有助于渲染,在映射之前,将 deformation 应用于所有接收到更新 pose 和 depth 的高斯上;
Experiments¶
Reference¶
- [12] Omnidata: A scalable pipeline for making multi-task mid-level vision datasets from 3d scans.
- [75] Glorie-slam: Globally optimized rgb-only implicit encoding point cloud slam.
- [79] Go-slam: Global optimization for consistent 3d instant reconstruction.