SplaTAM¶
约 1520 个字 2 张图片 预计阅读时间 5 分钟
Abstract
 SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM
SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAMIdea¶
Introduction¶
- 第一个 3DGS 结合 SLAM 的系统,用 3DGS 表示场景,可以用无位姿的单目 RGB-D 相机实现密集 SLAM
- 解决神经辐射场场景表示的局限性,包括快速渲染和优化,确定区域是否被 map 的能力,以及通过添加和删除高斯的结构化地图扩展
- 采用了一个在线跟踪和建图框架,同时裁剪它,以专门使用底层的高斯表示和通过可微渲染的 silhouette( 轮廓 ) 引导的优化
- 同时优化位姿估计、场景重建和新视角合成,允许实时渲染高分辨率的密集 3D 地图
高斯地图表示 ¶
- 场景中的底层地图表示为一组三维高斯分布,简化原始 GS,只使用与视图无关的颜色,并迫使高斯分布是各向同性
- 每个高斯值只有 8 个参数(RGB 3 个,中心位置 3 个,半径 1 个,不透明度 1 个)
- 根据高斯分布的不透明度加权的标准(非归一化)高斯方程,每个高斯分布都影响三维空间 \(x \in R^3\) 的一个点:
\[
f(\mathcal{x}) = o \exp \left ( - \frac{\left \| \mathcal{x} - \mathcal{\mu} \right \|^2 }{2r^2} \right)
\]
泼溅的可微渲染 ¶
- 能够将底层高斯地图中的高保真颜色、深度和轮廓图像渲染到任何可能的相机参考帧中
- 可微渲染允许直接计算底层场景表示(高斯)和相机参数的梯度,利用渲染和真实的 RGB-D 帧之间的误差,并更新高斯和相机参数来减少误差
- 高斯渲染 RGB 图像的过程:给定一个三维高斯和相机位姿的集合,首先从前往后对所有高斯进行排序,通过在像素空间中,依次 \(\alpha\)- 合成每个高斯分布的二维投影,来渲染 RGB 图像
- 像素 \(p=(u,v)\) 渲染颜色公式:
\[
\begin{aligned}
C(\mathcal{p}) = \sum_{i=1}^n \mathcal{c}_i f_i(\mathcal{p}) \prod_{j=1}^{i-1}(1 - f_j(\mathcal{p})) \\
\mathcal{\mu}^{2D} = K \frac{E_t \mathcal{\mu}}{d}, \ \ \ r^{2D} = \frac{fr}{d}, \ \ \ where d = (E_t \mathcal{\mu})_z
\end{aligned}
\]
- \(K\) 是相机内参,\(E_t\) 是第 \(t\) 帧处的相机旋转和平移的外参,\(f\) 是焦距,\(d\) 是相机坐标系下第 \(i\) 个高斯值的深度
- 类似的深度渲染(可以与输入深度图比较,返回相对于 3D 地图的梯度)
\[
D(\mathcal{p}) = \sum_{i=1}^n d_i f_i(\mathcal{p}) \prod_{j=1}^{i-1}(1 - f_j(\mathcal{p}))
\]
- 渲染一个 silhouette(轮廓)图像来确定可见性,例如一个像素是否包含来自当前地图的信息:
\[
S(\mathcal{p}) = \sum_{i=1}^n f_i(\mathcal{p}) \prod_{j=1}^{i-1}(1 - f_j(\mathcal{p}))
\]
SLAM 系统 ¶
Tip
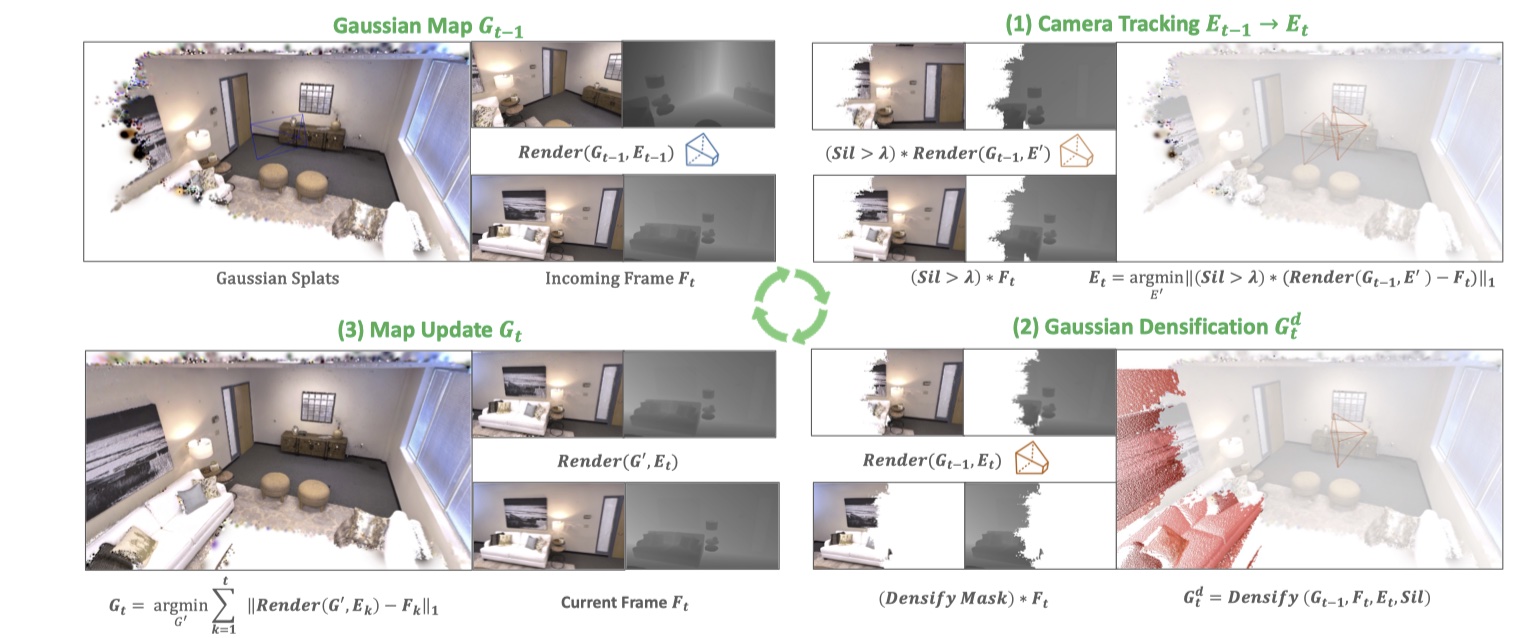
从高斯底层表示和可微渲染器建立一个 SLAM 系统。 假设有一个现有的地图(通过一组三维高斯分布表示),已经拟合了第 1 帧到第 t 帧。给定一个新的 RGB-D 帧 t+1,SLAM 系统会进行以下操作:
- 相机跟踪:利用 t + 1 帧的相机位姿,最小化 RGB-D 序列的图像和深度重建误差,但只评估轮廓内的像素的误差
- 高斯密度:根据渲染的轮廓和输入深度,向地图中添加新的高斯
- 地图更新:给定从第 1 帧到 第 t+1 帧的相机位姿,最小化所有图像的 RGB 和深度误差来更新高斯分布参数。代码中,为保持批处理大小和可管理性,将对选好的,与最近帧重叠的关键帧子集进行优化
初始化 ¶
第一帧跳过跟踪,将相机位姿设置为 identity,稠密化中,由于渲染的轮廓为空,所有像素都用于初始化新的高斯。对于每个像素,添加一个颜色为像素的新高斯,中心位置为投影的像素深度,不透明度为 0.5,半径等于一个像素半径投影到 2D 图像的深度除以焦距 \(r = \frac{D_{GT}}{f}\)
相机跟踪 ¶
- 估计当前输入的在线 RGB-D 图像的相机位姿。通过对相机中心 + 四元数空间中姿态参数的恒定速度正向投影,为一个新的时间步初始化相机位姿
\[
E_{t+1}=E_t + (E_t - E_{t-1})
\]
- 通过基于梯度的优化,通过可微分渲染 RGB、深度、和轮廓图,并更新相机参数,同时保持高斯参数不变,以最小化损失:
\[
L(t) = \sum_\mathcal{p} (S(\mathcal{p}) > 0.99)(L_1(D(\mathcal{p}))+0.5L_1(C(\mathcal{p})))
\]
- 上述为深度和颜色上的 \(L_1\) 损失,颜色的权重少一半,只应用以上损失于通过轮廓图渲染的像素。轮廓图捕获了地图的不确定性。这对于跟踪新的相机位姿非常重要,因为新帧通常包含在地图中尚未捕获或经过良好优化的新信息。如果一个像素没有 GT 深度,则 \(L_1\) 损失为 0
高斯稠密化 ¶
-
为每个新进入帧在地图中初始化新的高斯分布。
- 在跟踪之后,对新进入帧的相机位姿有一个准确的估计
- 对于深度图像,对高斯分布在场景中的位置有了好的估计
- 当前的高斯已经准确地表示场景几何,不需要添加高斯,因此创建一个密集化 mask 来确定哪些像素应该被密集化
\[ M(\mathcal{p}) = (S(\mathcal{p})<0.5) + (D_{GT}(\mathcal{p})<D(\mathcal{p}))(L_1(D(\mathcal{p}))>50 MDE) \] -
此 mask 只显示地图密度不足的地方 (\(S < 0.5\)),或者在当前估计的几何图形前面有新的几何图形。对于每个像素,基于这个 mask,添加一个新的高斯进行第一帧初始化
高斯地图更新 ¶
- 基于估计的在线相机位姿下,更新三维高斯地图的参数。通过可微渲染和基于梯度的优化来实现,和跟踪不同的是,相机位姿是固定的,高斯分布的参数被更新
- 和已知相机位姿的图像拟合辐射场的经典问题相似,有两个优化的地方:
- 不是从头开始,而是从最近构建的地图中预热,开始优化
- 不优化所有之前的关键帧,而是选择可能影响新添加的高斯分布的帧。将每 n 帧保存为关键帧,并选择 k 帧进行优化,包括当前帧、最近的关键帧,以及 k−2 之前与当前帧重叠最高的关键帧。重叠是通过取当前帧深度图的点云,并确定每个关键帧的错误点数来确定的
- 优化和跟踪的损失相似,但不使用轮廓 mask(因为要优化所有像素
) 。另外在 RGB 渲染中添加一个 SSIM 损失,并剔除不透明度接近 0 的无用高斯分布
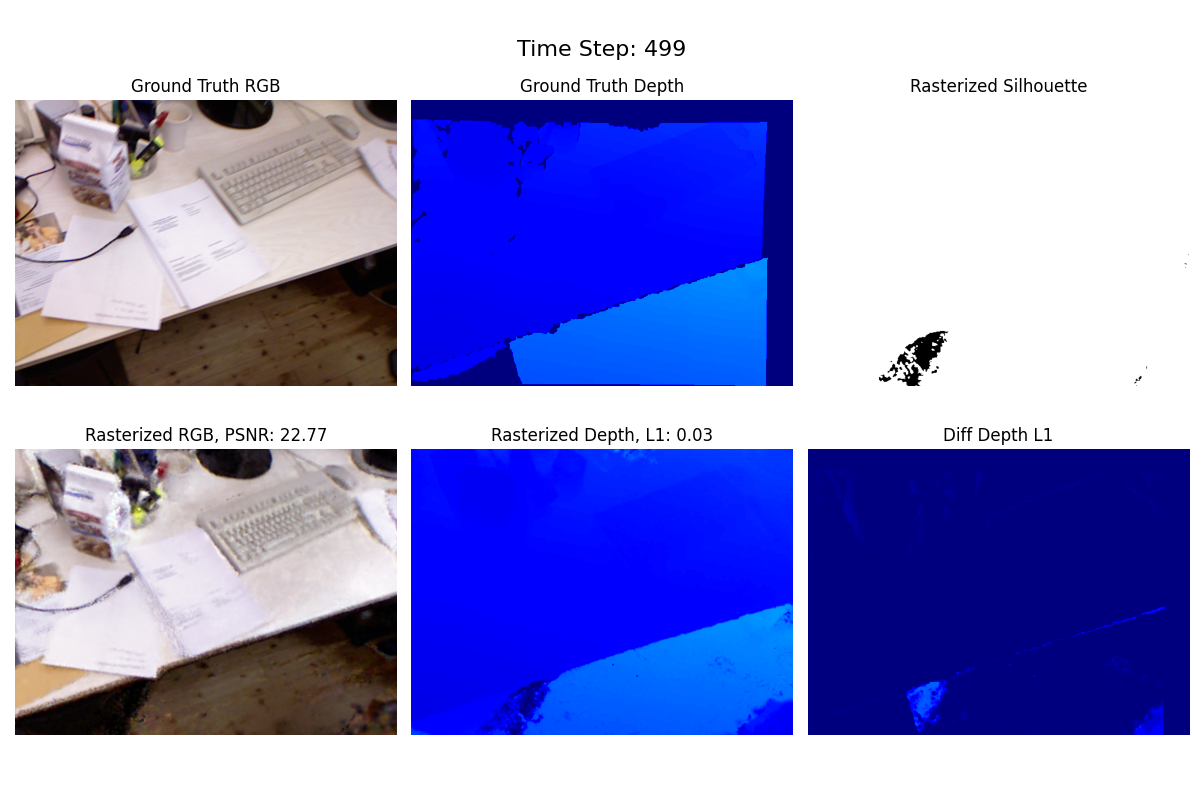
Experiment¶
Reference¶
- 学习笔记之——3D Gaussian SLAM,SplaTAM 配置(Linux)与源码解读 -CSDN 博客
- 实验笔记之——基于 TUM-RGBD 数据集的 SplaTAM 测试 _jiyu tum-rgbd 数据集的 splatam 测试 -CSDN 博客
- 【三维重建
】 【SLAM】SplaTAM:基于 3D 高斯的密集 RGB-D SLAM(CVPR 2024)-CSDN 博客 - 论文复现《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》_splatam 论文解析 -CSDN 博客