WildGS-SLAM¶
约 816 个字 2 张图片 预计阅读时间 3 分钟
Abstract
 WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dynamic Environments
WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dynamic EnvironmentsIntroduction¶
问题导向
3DGS 如何引入动态环境单目 SLAM?
解决方案
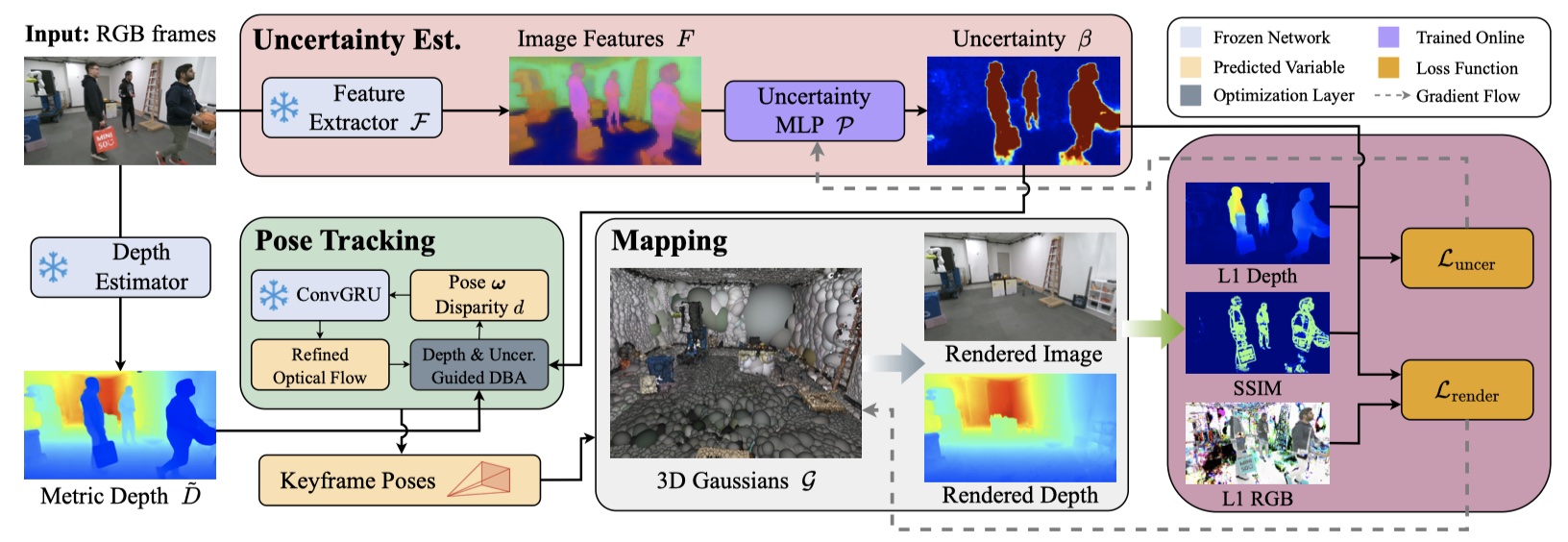
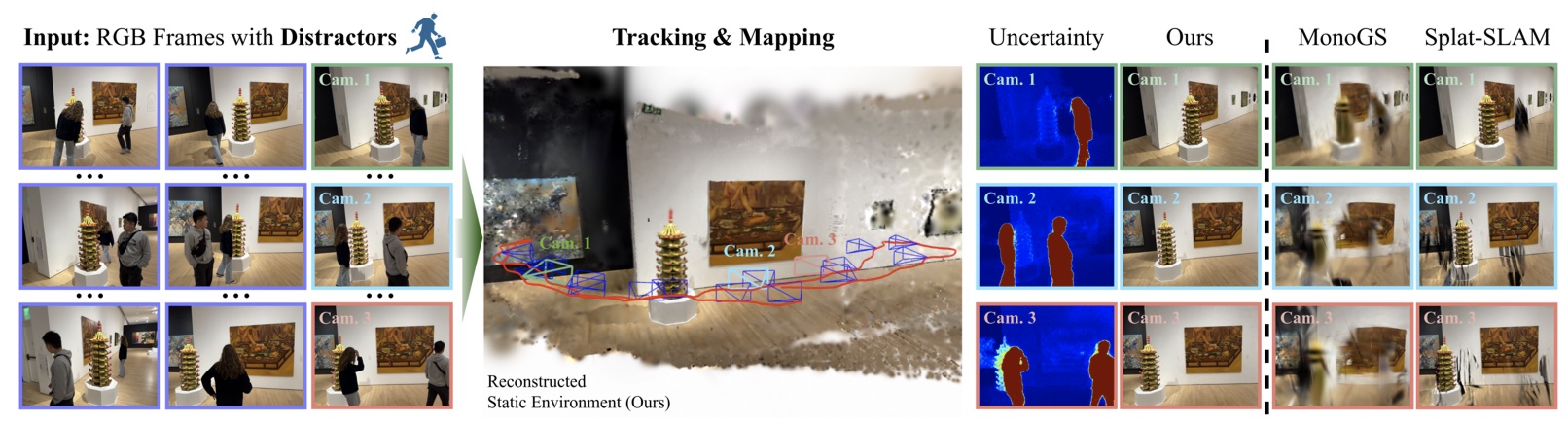
利用不确定性感知几何映射来处理动态环境。
- 整合深度和不确定性信息;
- 引入一种不确定性地图,由一个浅层 MLP 和 DINOv2 features 预测得出,用于引导动态物体的去除,增强了 DBA 和高斯地图优化;
Method¶
Uncertainty Prediction¶
- 采用 NeRF-On-the-go 和 WildGaussians 的不确定性组件,在训练过程中加入自定义的深度不确定性损失。对于输入帧,提取 DINOv2 特征,并利用 MLP 实时训练,用来预测像素级的不确定性图;
- Feed-Forward Uncertainty Estimation:DINOv2 使用了微调的版本:[57],提取后的 features 作为 MLP 的输入,输出为不确定性图;
-
Uncertainty Loss Function:采用改进的 SSIM 以及来自 NeRF-On-the-go 的两个 regularizations terms,以及 L1 depth loss term,$$ 这个额外的深度信号可以提高模型区分干扰项的能力,增强不确定性 MLP 的训练;
\[ \mathcal{L}_{\mathrm{uncer}}=\frac{\mathcal{L}_{\mathrm{SSIM}}^{\prime}+\lambda_{1}\mathcal{L}_{\mathrm{uncer_D}}}{\beta_{i}^{2}}+\lambda_{2}\mathcal{L}_{\mathrm{reg_V}}+\lambda_{3}\mathcal{L}_{\mathrm{reg_U}} \]
Tracking¶
- 基于 DROID-SLAM,在 DBA 中融入 depth 和 uncertainty,引入 Loop Closure 和 online global BA;
- Depth and Uncertainty Guided DBA:将估计出的 uncertainty map 整合到 BA 优化目标,处理动态,利用 Metric3D V2 [13] 估计出的度量深度稳定 DBA 层;因为 MLP 是在线训练,并能给出准确不确定性估计,所以在跟踪的早期阶段,对于每个新插入的关键帧,首先估计单目度量深度,并将其与光流一起添加到 DBA 目标优化:
\[
\arg\min_{\boldsymbol{\omega},d}\sum_{(i,j)\in E}\left\|\tilde{p}_{ij}-\Pi_{c}\left(\boldsymbol{\omega}_{j}^{-1}\boldsymbol{\omega}_{i}\Pi_{c}^{-1}\left(p_{i},d_{i}\right)\right)\right\|_{\Sigma_{ij}/\beta_{i}^{2}}^{2}+\lambda_{4}\sum_{i\in V}\left\|M_{i}\left(d_{i}-1/\tilde{D}_{i}\right)\right\|^{2}
\]
Mapping¶
- 预测出插入的 keyframe 的 pose 后,按照 MonoGS 的 RGBD 策略,扩展高斯地图覆盖新探索的区域;在优化之前,如果先前 keyframe 的 pose 通过 Loop Closure 或全局 BA 更新,则会像 Splat-SLAM 主动 defrom 高斯地图;
-
Map Update
- 对高斯模型进行迭代优化,类似 MonoGS 采用 inter-frame covisibility 选择 keyframe,维持一个 local window,每次迭代中,至少 50% 的概率从 local window 中的 keyframe 均匀随机采样一个 keyframe,而所有其他 keyframe 平均分配剩余概率。对于选定的 keyframe,通过最小化 render loss \(\mathcal{L}_{\mathrm{render}}\) 优化高斯地图:
\[ \mathcal{L}_{\mathrm{render}}=\frac{\lambda_5\mathcal{L}_{\mathrm{color}}+\lambda_6\mathcal{L}_{\mathrm{depth}}}{\beta^2}+\lambda_7\mathcal{L}_{\mathrm{iso}} \\ \mathcal{L}_{\mathrm{color}}=(1-\lambda_{\mathrm{ssim}})\|\hat{I}-I\|_1+\lambda_{\mathrm{ssim}}\mathcal{L}_{\mathrm{ssim}} \]- 引入不确定性图 \(\beta\) 作为 \(\mathcal{L}_{\mathrm{color}}\) 和 \(\mathcal{L}_{\mathrm{depth}}\) 的加权因子,同时用各向同性正则化损失 \(\mathcal{L}_{\mathrm{iso}}\) 对高斯进行约束,防止在稀疏观测区域过度生长
- 每次迭代中,还会计算 \(\mathcal{L}_{\mathrm{uncer}}\),用于与地图优化并行训练 MLP
Experiments¶
Reference¶
- [13] Metric3d v2: A versatile monocular geometric foundation model for zero-shot metric depth and surface normal estimation.
- [39] Splat-slam: Globally optimized rgb-only slam with 3d gaussians.
- [57] Improving 2d feature representations by 3d-aware fine-tuning.
- [60] Glorie-slam: Globally optimized rgb-only implicit encoding point cloud slam.