AnyCam¶
约 785 个字 预计阅读时间 3 分钟
Abstract
 AnyCam: Learning to Recover Camera Poses and Intrinsics from Casual Videos
AnyCam: Learning to Recover Camera Poses and Intrinsics from Casual VideosIntroduction¶
问题导向
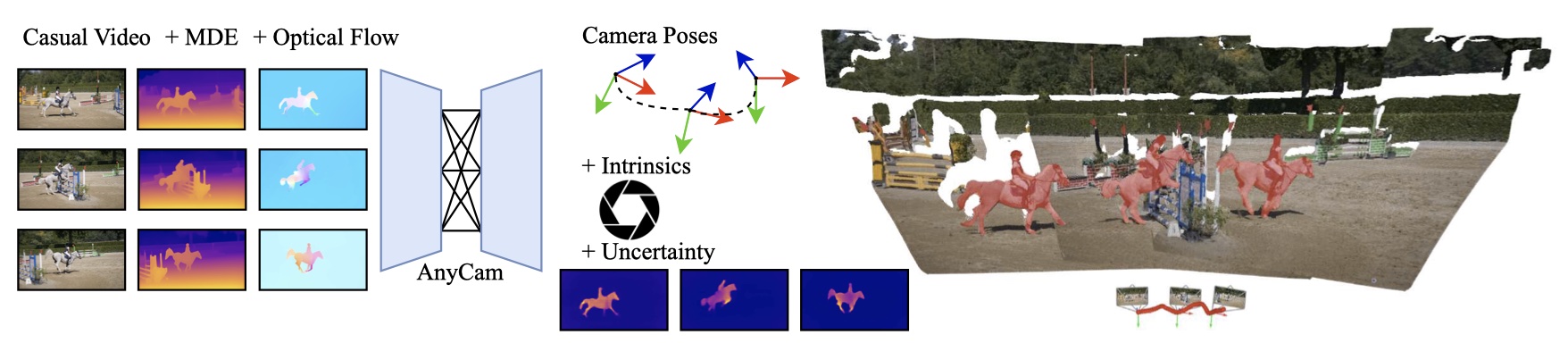
传统 SfM 和 SLAM 在处理任意动态视频数据时困难,通常需要已知的相机内参或 test-time 优化。如何解决在处理动态场景和无标签视频时的局限性。
解决方案
- 采用 Transformer 架构提取深度和光流等特征,端到端地学习视频帧序列的相对相机位姿和内参;
- 采用不确定性建模,可以处理原始视频且无标签,自动过滤动态物体;
- 提出一个轻量级的测试时轨迹优化方法,以避免长期漂移。
Method¶
Transformer for Camera Prediction¶
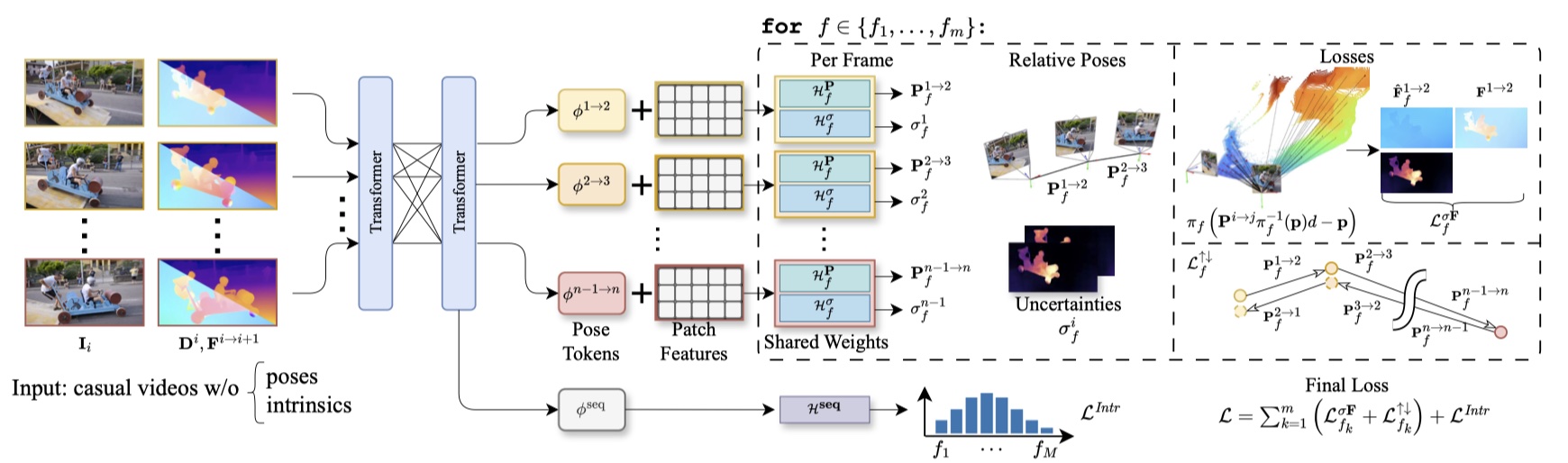
- Backbone:使用一个预训练的 Backbone,输入为视频帧、预训练的深度信息和光流信息;
- Transformer Encoder:提取到的特征被送入 Encoder,利用 Self-Attention 学习视频帧之间的关系;
- Pose Prediction Head(HP):预测每一帧相对位姿;
- Uncertainty Prediction Head(Hσ):预测不确定性图,表示每个像素的动态可能性;
- Intrinsics Prediction Head(Hseq):预测相机内参,首先采用多个候选焦距值,然后训练多个 HP 和 Hσ,输出最大似然度对应的值。
Dynamics-aware Pose Training¶
-
Uncertainty-aware flow loss
- 利用预测的位姿和深度图,得到投影的“induced optical flow”;
- 比较“induced optical flow”和真实光流,且使用不确定性图 \(\sigma\) 对损失加权;
\[ \mathcal{L}_f^{\sigma\mathbf{F}^{i\to j}}=-\frac{1}{|\Omega|}\sum_{uv\in\Omega}\ln\frac{1}{\sqrt{2}\sigma_{f,uv}^i}\exp-\frac{\sqrt{2}\ell_{f,uv}^{\mathbf{F}^{i\to j}}}{\sigma_{f,uv}^i} \] -
Pose Consistency Loss
- 为保证时间上的一致性,预测相机位姿时考虑整个序列的上下文(某些帧的光流预测不准确,或动态物体会遮挡相关的静态部分
) ,所以引入一个额外的损失项和 dropout 训练策略。 - 序列反转,要求正向预测的位姿和反向预测的位姿互为逆变换,强制位姿一致性;
- 为保证时间上的一致性,预测相机位姿时考虑整个序列的上下文(某些帧的光流预测不准确,或动态物体会遮挡相关的静态部分
\[
\mathcal{L}_f^{\uparrow\downarrow}=\sum_{i=1}^{n-1}\left\|\left(\mathbf{P}_f^{i\to i+1}\right)^{-1}\mathbf{P}_f^{i+1\to i}-\mathbf{I}_4\right\|_{1,1}
\]
- Intrinsics Loss(Lintr)
- 为了选择最佳焦距值,训练 Hseq 来预测哪些焦距候选值会产生最低的光流损失;
- 使用 KL 散度衡量预测的可能性和基于 flow loss 计算目标概率的差距;
\[
\mathcal{L}^{Intr}=\mathbf{KL}_{\mathrm{div}}\left(\mathcal{P},\mathrm{softmax}(-\mathcal{L}_{f_1}^{\sigma\mathbf{F}},\ldots,-\mathcal{L}_{f_m}^{\sigma\mathbf{F}})\right)
\]
- Final Loss
\[
\mathcal{L}=\sum_{k=1}^m\left(\lambda_{\sigma\mathbf{F}}\mathcal{L}_{f_k}^{\sigma\mathbf{F}}+\lambda_{\uparrow\downarrow}\mathcal{L}_{f_k}^{\uparrow\downarrow}\right)+\lambda_\mathrm{Intr}{\mathcal{L}}^{Intr}
\]
Test-time Refinement¶
- 为了减少长时间运动中积累的漂移:
- 特征跟踪:在视频帧中提取一些特征点,并使用光流跟踪这些点在后续帧中的位置;
- BA:优化相机位姿和特征点的位置(需要用不确定性图作为权重
) ; - 滑动窗口优化:每次只优化一个窗口内的帧,然后滑动到下一个位置。
Experiments¶
Reference¶
- [ 论文审查 ] AnyCam: Learning to Recover Camera Poses and Intrinsics from Casual Videos
- https://fwmb.github.io/anycam/
最后更新:
2025年8月27日 10:40:53
创建日期: 2025年8月27日 10:40:53
创建日期: 2025年8月27日 10:40:53