InstantSplat¶
约 398 个字 预计阅读时间 1 分钟
Abstract
 InstantSplat: Sparse-view Gaussian Splatting in Seconds
InstantSplat: Sparse-view Gaussian Splatting in SecondsIntroduction¶
问题导向
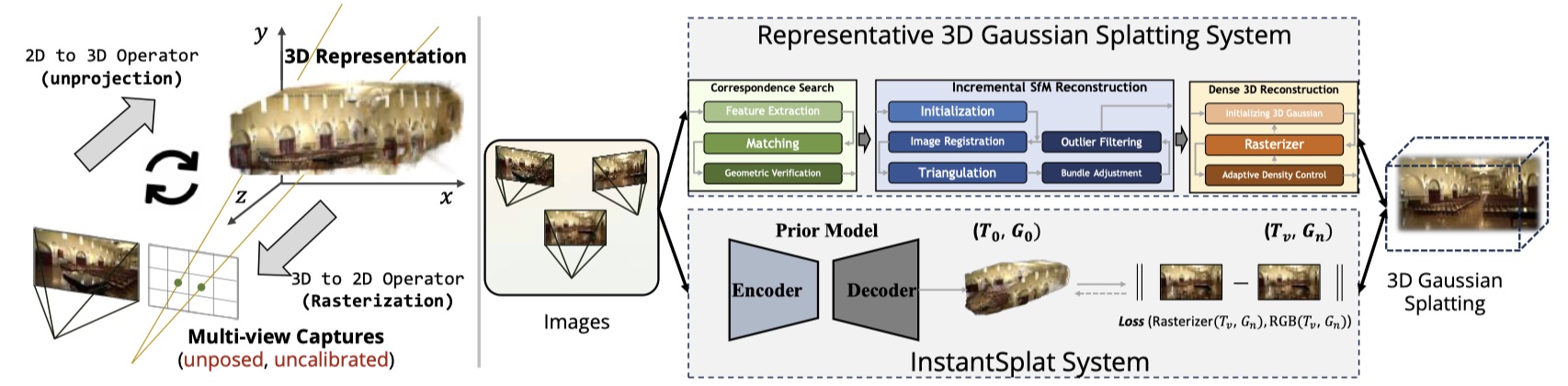
COLMAP + 3DGS Pipleline 存在的问题:
- 3DGS 很大程度上依赖 COLMAP 导出的点和 Pose 的精度,并且 COLMAP 非常耗时
- 对于场景的稀疏视角重建,如果输入的图片很少并且缺乏重叠,COLMAP 很难估计准确的相机参数
- 3DGS 对于点云的密集处理依靠 Adaptive Density Control,其灵敏度很高,会针对每个场景进行调整(调整阈值、遮挡稀疏点云、添加相机参数噪声等等
) ,并显著影响性能 - COLMAP 和 3DGS 是没有关联,相互独立,所以误差会逐步累积
解决方案
- 1+2: 使用 DUSt3R 代替 COLMAP
- 3: DUSt3R 得到的是一个密集且精确的点云,GS 训练过程无需做高斯球的 ADC
- 4: 自监督联合优化相机位姿以及 GS 参数
Method¶
GS 参数和相机位姿的自监督联合优化 ¶
通过最小化光度误差的梯度下降法,联合优化所有高斯参数和调整相机参数 ,允许模型 G 在目标观察位置 T 处的视角的置信度误差,梯度在 DUSt3R 框架中从置信度图回传到相机位姿 :
\[
\mathbf{G}^{*},\mathbf{T}^{*}=\underset{\mathbf{G},\mathbf{T}}{\operatorname*{\operatorname*{\operatorname*{\operatorname*{\arg\min}}}}}\sum_{v\in N}\sum_{i=1}^{HW}\left\|\tilde{\mathbf{C}}_{v}^{i}-\mathbf{C}_{v}^{i}(\mathbf{G},\mathbf{T})\right\|
\]
Experiments¶
Reference¶
最后更新:
2025年5月9日 15:51:31
创建日期: 2023年8月26日 15:00:56
创建日期: 2023年8月26日 15:00:56