MASt3R¶
约 1123 个字 预计阅读时间 4 分钟
Abstract
- paper:
 Grounding Image Matching in 3D with MASt3R
Grounding Image Matching in 3D with MASt3R - code: mast3r
Introduction¶
问题导向
图像匹配是所有 3D 视觉领域中性能最佳算法和流程核心组成部分。尽管匹配本质上是一个 3D 问题,与相机位姿和场景几何形状息息相关,但它通常被当做 2D 问题处理。因为匹配的目标是在 2D 像素场之间建立对应关系。
解决方案
MASt3R 在 DUSt3R 的基础上,提高匹配能力。在 DUSt3R 前额外加一个 network 输出稠密的 local features,并添加 matching loss 来训练。最后引入一种快速相互匹配方案,能够将匹配速度提高几个数量级。
Method¶
MASt3R Matching¶
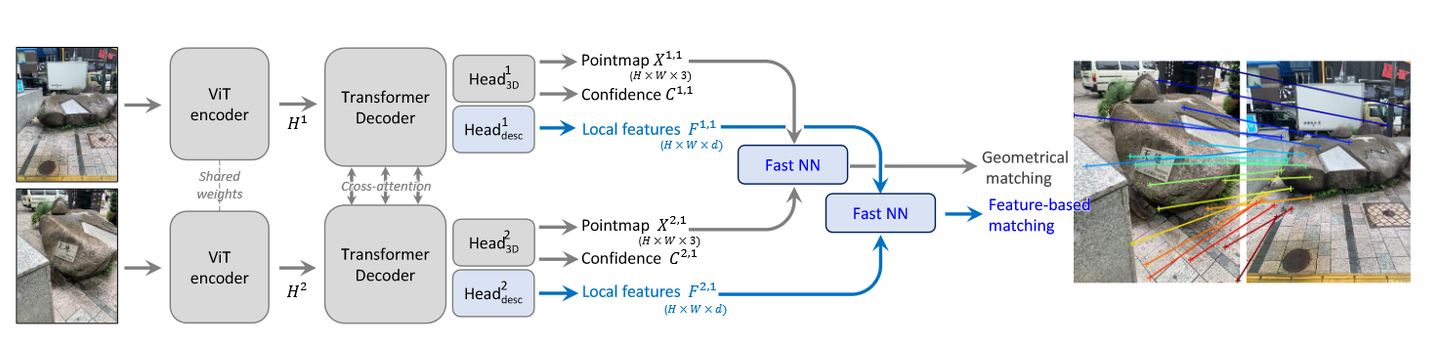
- matching 的网络结构和 DUSt3R 基本一致,蓝色的部分是新增的模块。比较明显的是新增了一个 head 用来提取 local features。然后多了两个最近邻匹配模块用来构建匹配。
-
对于 loss,对 DUSt3R 的 \(\mathcal{l}_{\mathrm{regr~}}\) 做了修改,然后新增了匹配 loss。
- MASt3R matching 取消了不同的深度正则化项,直接用 gt 的平均深度。
\[ \mathcal{l}_{\mathrm{regr~}}(j, i) = \frac{\bar{X}_i^j - X_i^j}{\bar{z}} \\ \mathcal{L}_{\mathrm{conf~}} = \sum_{v \in \{1, 2\}} \sum_{i \in D^v} C_i^v \mathcal{l}_{\mathrm{regr~}}(v, i) - \alpha \log C_i^v \]- 因为新增了一个用于匹配的 head 输出,希望每个像素点最多和另一张图的一个像素点匹配,这部分称为 infoNCE loss,假设 gt 的匹配点为 \(\hat{\mathcal{M}} = \{ (i, j) | \hat{X}_i^{1,1} = \hat{X}_j^{2, 1} \}\),并记 \(D_i^v\) 为 \(HEAD_{desc}^v\) 的输出为
\[ \mathcal{L}_{\mathrm{match~}}=-\sum_{(i,j)\in\hat{\mathcal{M}}}(\log\frac{s_\tau(i,j)}{\sum_{k\in\mathcal{P}_1}s_\tau(k,j)}+\log\frac{s_\tau(i,j)}{\sum_{k\in\mathcal{P}_2}s_\tau(i,k)}) \\ s_\tau(i,j)=exp[-\tau {D_i^1}^\top D_j^2],\mathcal{P}^1=\{i|(i,j)\in\hat{\mathcal{M}}\},\mathcal{P}^2=\{j|(i,j)\in\hat{\mathcal{M}}\} \]- 这里的 s 是一个相似性度量,表示图像 1 中第 i 个描述符和图像 2 中第 j 个描述符的相似性。D 是描述符的特征向量,\(\tau\) 是温度超参数,控制相似性分布的平滑程度。
- 最终的 loss 为 \(\mathcal{L}_{total} = \mathcal{L}_{\mathrm{conf~}} + \beta \mathcal{L}_{\mathrm{match~}}\)
- 有了 Model 和 Loss 就可以训练,但是网络只输出 PointMap 和每个像素的 LocalFeature,而期望得到两个图像之间的像素点级别的匹配,匹配的部分就是新增的 NN 模块。
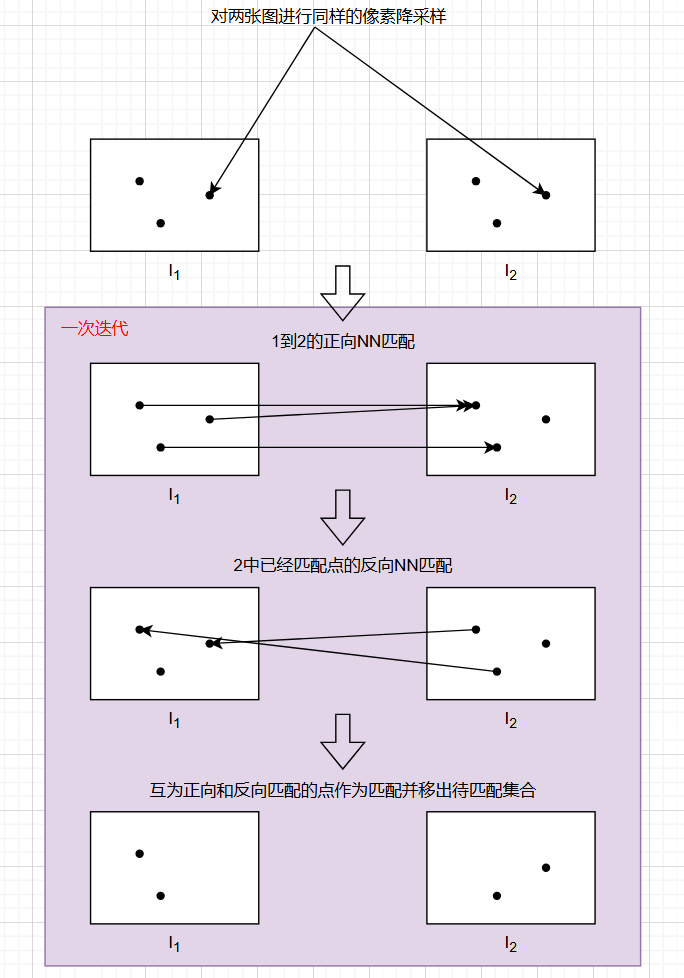
- 匹配:
- 先对两个图像对应的特征点进行降采样,先得到图像 1 的特征点对于图像 2 的正向 NN 匹配,在从已经匹配上的图像 2 特征点反向 NN 匹配到图像 1,能够形成闭环的 NN 匹配关系便成为最终的匹配。一次迭代同时包含正向和反向 NN 匹配,这样可以快速收敛。
- 优化:降采样之后的最近邻不一定是真的最近邻,所以要回到原分辨率的图像上,重新分块再来一遍匹配(无论是分块还是降采样肯定都比直接全局 NN 快得多
) 。
MASt3R SfM¶
- MASt3R SfM 在 pipeline 里集成了多帧输入,但是一次只能处理两张图片,MASt3R SfM 基于 MASt3R matching,只用到了 encoder 的输出作为 tokenFeature(不是 head 输出的 LocalFeature
) ,而不需要像素级别的匹配关系。 - 类似于 DUSt3R,先基于重叠视角构建一个 Graph:
- 根据 encoder 输出的 tokenFeature,使用 FPS 来选出 N 个关键帧,然后两两相连,构成 \(N^2\) 条边。
- 剩余的普通帧连接到最近的关键帧上,还会通过 NN 连接到最近的 k 个普通帧上。
- 计算特征的距离完全基于 tokenFeature,对于 tokenFeature 白化后计算二进制距离来实现,而一个图像不止一个特征,所以采用 ASMK 算法计算相似度来描述两张图像重叠视野。
- 使用 encoder 输出而不是 head 输出作为 feature,是因为 encoder 的输入只要一张图像,每个图像都过一遍 encoder,且不可缺少,所以提取特征没有开销。
- 构建 pair 时用 encoder 输出作为 tokenFeature,后续的匹配和优化使用 head 输出的 LocalFeature。
- 匹配与标准点图、BA 优化
Experiments¶
Reference¶
- MASt3R 落地 3D 的图像匹配
- 论文阅读笔记之《MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors》
- DUSt3R 和 MASt3R 论文解析
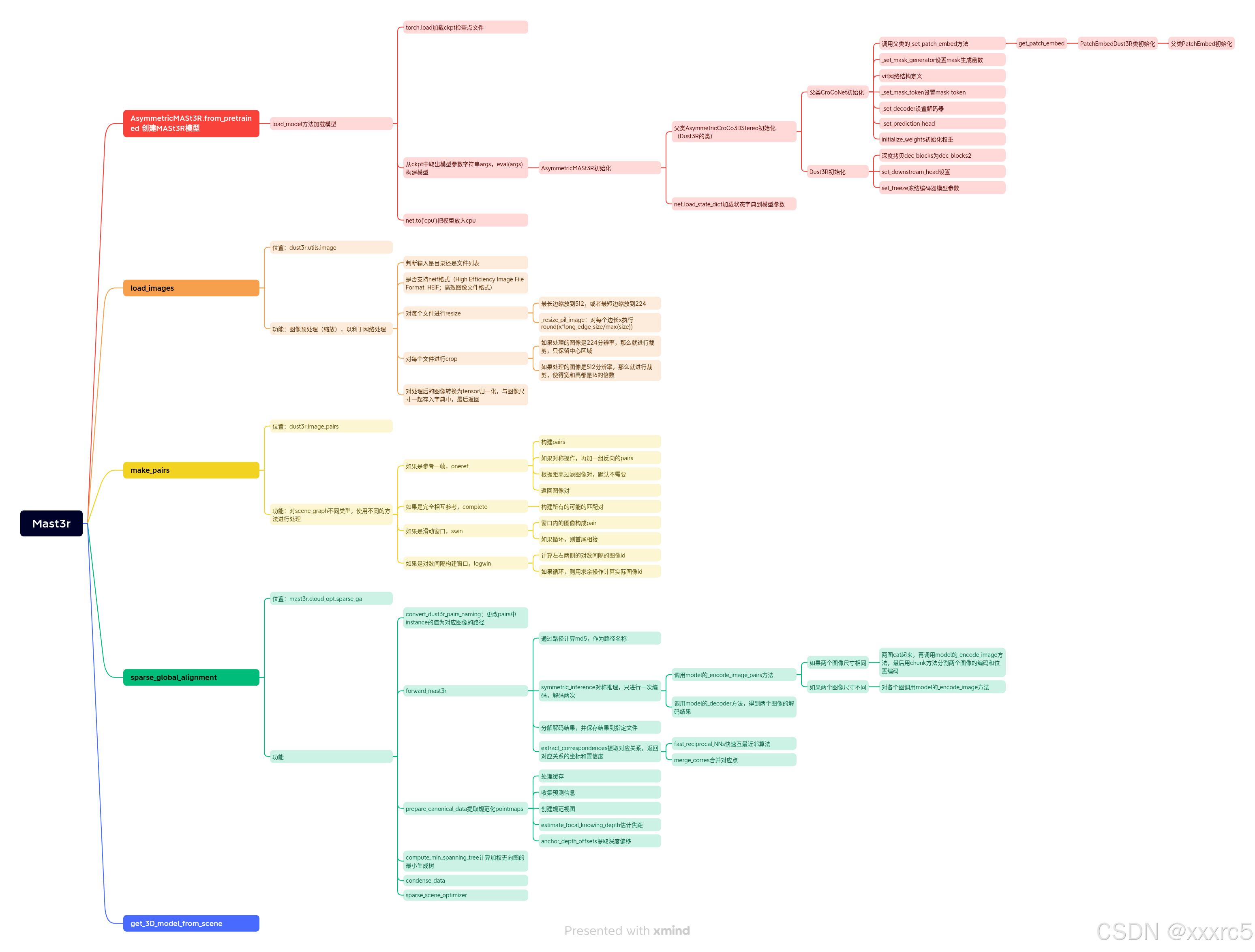
- Mast3R 代码解读
最后更新:
2025年5月9日 15:51:31
创建日期: 2023年8月26日 15:00:56
创建日期: 2023年8月26日 15:00:56