VGGT-Long¶
约 749 个字 预计阅读时间 2 分钟
Abstract
 VGGT-Long: Chunk it, Loop it, Align it – Pushing VGGT’s Limits on Kilometer-scale Long RGB Sequences
VGGT-Long: Chunk it, Loop it, Align it – Pushing VGGT’s Limits on Kilometer-scale Long RGB SequencesIntroduction¶
问题导向
当前单目三维重建基于 foundation model 的方法(如 VGGT、CUT3R、MASt3R)在小场景中精度高,但在长序列上扩展性差。能否只通过已有的 VGGT + 极简策略,就把短序列能力扩展到公里级长序列?
解决方案
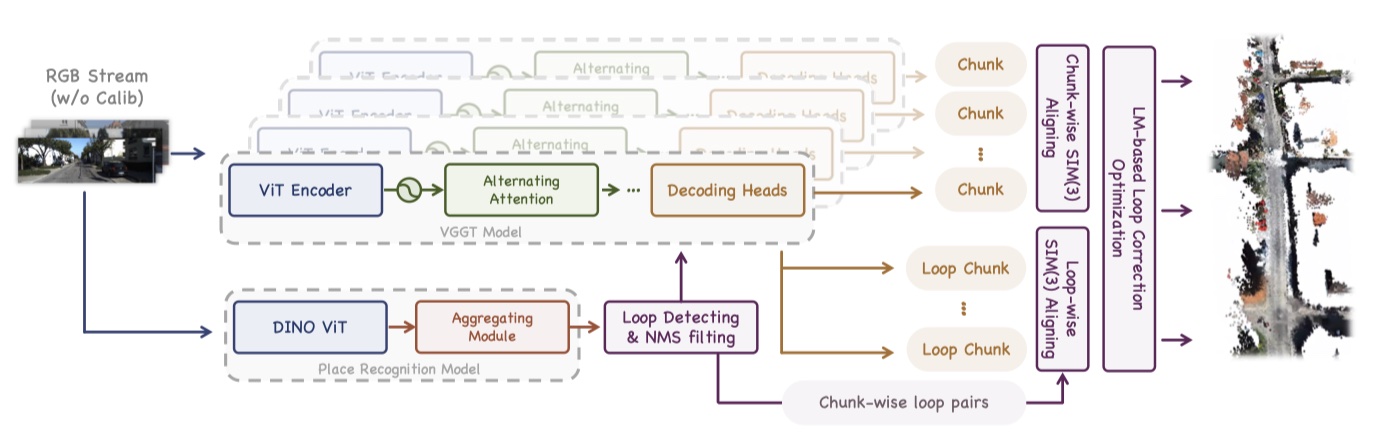
- Chunking: 将长序列分块,分别丢给 VGGT 处理;
- Chunk-wise Aligning:利用 VGGT 自带的置信度地图对相邻块进行 SIM(3) 配准
- Loop Closure + Global Optimization:查找非邻接回环,做全局优化消除累积漂移。
Method¶
Sequence Chunking and Local Aligning with Confidence¶
分块处理 ¶
- 给定长序列,按照窗口长度 L 和重叠长度 O 进行滑动切块;
- 第 k 个块 \(C_k\) 包含帧 : \(C_k = \{I_{(k-1)(L-O)}+1, ..., I_{(k-1)(L-O)+L}\}\)
- 每个 chunk 被单独输入到 VGGT 中,输出:
- 每帧的相机位姿;
- 稠密点云 \(P_k\);
- 每个点的置信度 \(c_k\);
- 由于每段都不长,并且有重叠,所以可以进行对齐与拼接。
基于置信度的 SIM(3) 对齐 ¶
-
对每对相邻 chunk \(C_k\) 与 \(C_{k+1}\):
- 找到在重叠区域中的 3D 点对 \((p_k^i, p_{k+1}^i\);
- 使用加权的 IRLS 算法优化 SIM(3) 变换;
\[ \mathbf{S}_{k,k+1}^*=\arg\min_{\mathbf{S}\in\mathrm{Sim}(3)}\sum_i\rho\left(\|\mathbf{p}_k^i-\mathbf{S}\mathbf{p}_{k+1}^i\|_2\right) \] -
使用加权 Umeyama 算法求解 SIM(3);
- 策略细节:
- 置信度低于 chunk 中值 10% 的点直接丢弃;
- 中置信度(缓慢的车辆)赋较低权重;
- 高置信度主导对齐;
- 滤出动态物体、天空等非稳定区域;
Loop Detection and Loop-wise SIM(3) Aligning¶
Loop Detection¶
- 使用预训练的 DINOv2 提取每帧的 global feature;
- 基于余弦相似度 + 时间距离 \(\Delta t > t_{\min}\) 进行最近邻匹配;
- 应用 NMS,避免重复或近时序匹配;
- 得到高置信度图像级闭环对 \((I_i,I_j)\)。
构造“闭环 chunk”,实现几何约束 ¶
- 对于闭环对 \((I_i,I_j)\),提取以 i, j 为中心的子序列各一段,组成新 batch;
- 用 VGGT 再次处理,构造“闭环 chunk”点云;
- 将该 chunk 对齐到原始 \(C_i\) 和 \(C_j\),得到 \(S_{i, loop}, S_{j, loop}\);
- 闭环配准为 \(S_{j, i} = S_{j, loop} \cdot S_{i, loop}^{-1}\);
Global SIM(3) LM-based Optimization¶
- 为了获得全局一致性的轨迹和点云结果,执行 SIM(3) 空间下的全局 LM 优化:
- 优化变量:每个 chunk 对应的一个位姿变换 \(S_k \in Sim(3)\);
- 优化目标函数:
- 相邻块对齐约束:\(\arg\min_{\{\mathbf{S}_k\}}\sum_{k=1}^{K-1}\|\log_{\mathrm{Sim}(3)}(\mathbf{S}_{k,k+1}^{-1}\mathbf{S}_k^{-1}\mathbf{S}_{k+1})\|_2^2\)
- 闭环约束:\(\sum_{(i,j)\in\mathcal{L}}\|\log_{\mathrm{Sim}(3)}(\mathbf{S}_{ij}^{-1}\mathbf{S}_i^{-1}\mathbf{S}_j)\|_2^2\)
- 解法:
- 将 Sim(3) 映射到李代数 sim(3) 的 7D 切空间;
- 使用 LM 算法求解;
- Python 版本每步 3-13 ms,C++ 仅 0.4-1.3 ms;
- 通常 3 步收敛。
Experiments¶
Reference¶
最后更新:
2025年8月19日 15:01:04
创建日期: 2025年8月19日 15:01:04
创建日期: 2025年8月19日 15:01:04