FlowFusion¶
约 861 个字 3 张图片 预计阅读时间 3 分钟
Abstract
 FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical Flow
FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical FlowIntroduction¶
- 基于流的动态 / 静态分割来处理动态 SLAM 问题。
- 提供了一种新颖的基于光流残差的动态分割和密集融合 RGB-D SLAM 方案。
- 通过改善动态因素的影响,在当前 RGB-D 帧中有效地提取动态片段,然后准确地重建静态环境。
RELATED WORKS¶
- KinectFusion 和 ElasticFusion(EF) 实时重建静态室内环境。
- Co-Fusion(CF)是一个实时物体分割和追踪方法,结合了基于分层深度学习的分割方法和 EF 的静态稠密重建框架。
- 除了语义标记解决方案外,还有从稠密的 RGB-D 融合方案中找出动态点云作为异常值。例如联合运动分割和场景流估计方法(JF
) ,以及一种静态背景重建方法(SF) 。 - 利用基于深度学习的目标检测方法,通过预处理去除潜在的动态物体,然后重建环境。例如 PoseFusion(PF
) 。 - 将环境动态属性定义为语义概念,并利用 SLAM 工具解决。例如一种基于深度学习的 3D 场景流估计方法,该方法结合了两个深度学习网络。
OPTICAL FLOW BASED JOINT DYNAMIC SEGMENTATION AND DENSE FUSION¶
Visual Odometry in Dense RGB-D Fusion¶
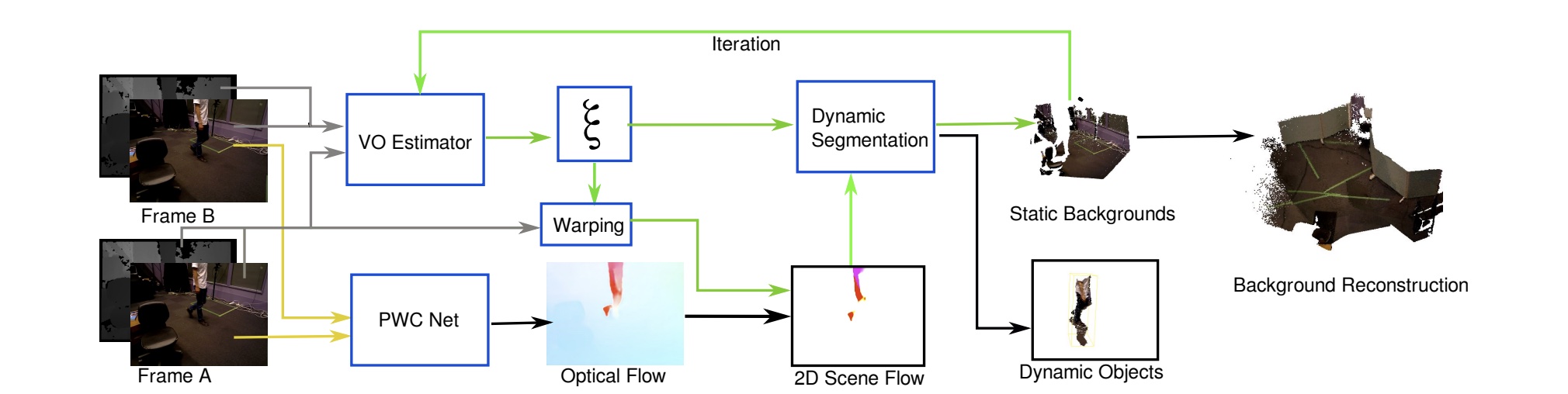
- 输入两个连续的 RGB-D 帧 A 和 B,RGB 图像首先被馈送到 PWC-net 用于光流估计。
- 强度和深度对 A 和 B 被馈送到鲁棒相机自我运动估计器,以初始化相机运动
Optical Flow Residual Estimated by Projecting the Scene Flow¶
- 通过计算每个簇的平均残差来区分是否为动态物体
- 例如背景不移动,因此它们的残差较低
- 动态物体的残差较高
- 深度和强度的残差不是一个好的指标,解决方案是使用场景流评估移动点云
- 为了摆脱相机的自身运动,引入了光流残差的概念,被定义为投影的 2D 场景流,以突出像素的动态属性。
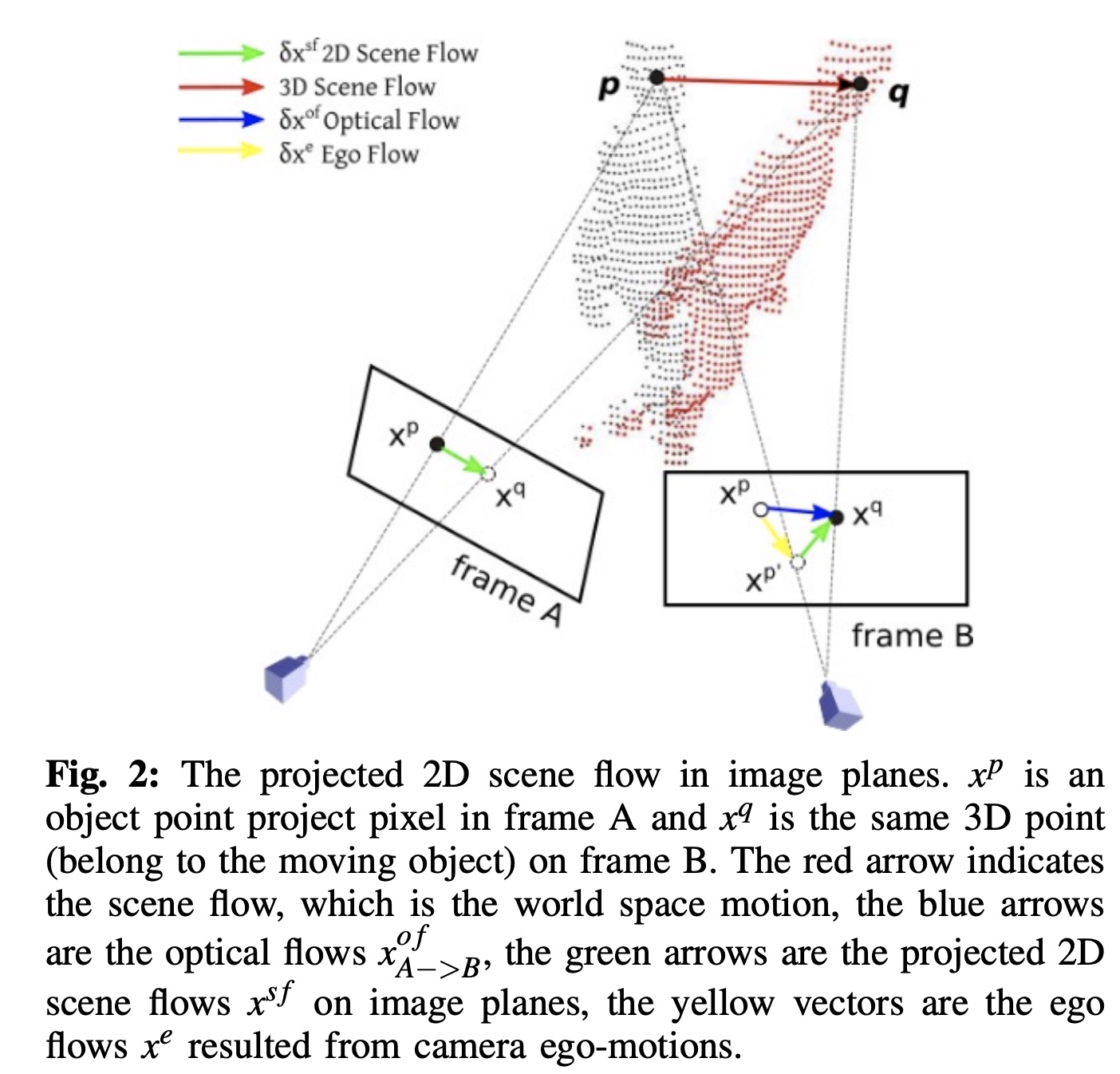
- 下图是投影的 2D 场景在图像平面中流动
- \(x^p\) 是帧 A 中的一个对象点投影像素
- \(x^q\) 是帧 B 中的同一个 3D 点(属于移动对象)
- 红色箭头表示场景流(世界空间运动)
- 蓝色箭头是 \(x^{a \to b}\) 中的光流
- 绿色箭头 \(x^{sf}\) 是图像平面中投影的 2D 场景流
- \(x^e\) 是摄像机自身运动产生的流
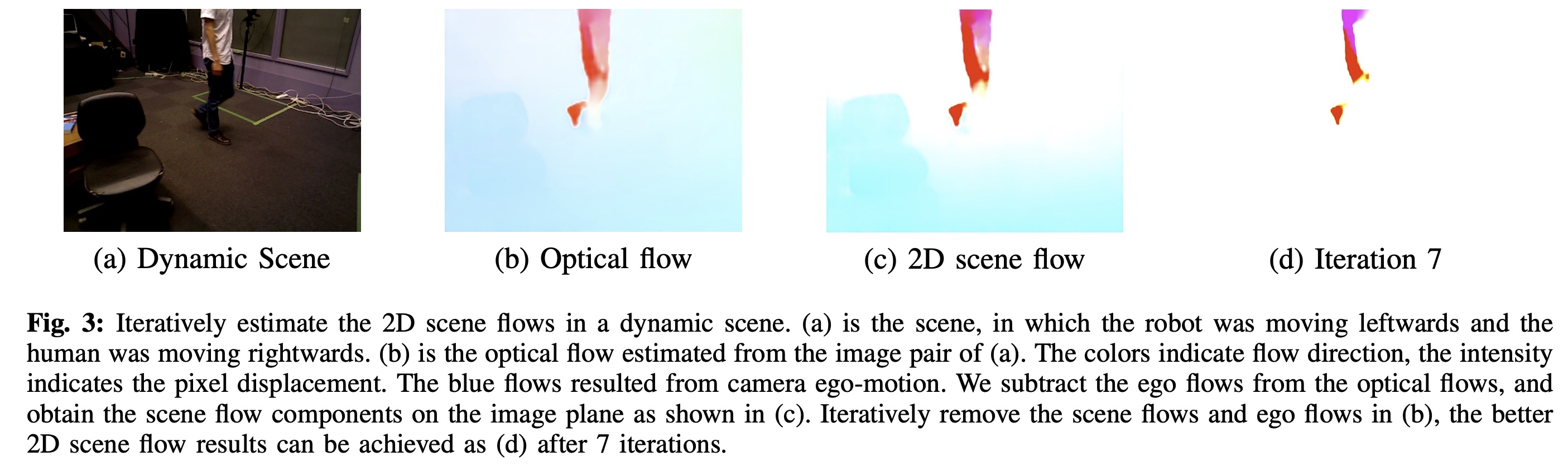
- 下图是迭代估计动态场景中的 2D 场景流 .(a) 是机器人向左移动而人类向右移动的场景 .(b) 是根据 (a) 的图像对估计的光流 . 颜色表示流动方向 , 强度表示像素位移 . 蓝色的流动是相机自我运动的结果 . 我们从光流中减去自我流 , 得到像平面上的场景流分量 , 如 (c) 所示 . 在 (b) 中迭代地移除场景流和 \(x^e\) 在 7 次迭代之后就可以获得更好的 2D 场景流结果 , 如 (d).
Dynamic Clusters Segmentation¶
- 已经定义了三个残差 \(r_I, r_D, r_F\),分别表示为强度、深度和光流
- 通过两步来区分簇是否为动态而不依靠平均残差
- 计算一个指标来组合这三个残差
- 设计一个最小化函数来限定簇的动态类别
DYNAMIC SLAM EXPERIMENTS AND EVALUATIONS¶
略。