EH-SurGS¶
约 904 个字 2 张图片 预计阅读时间 3 分钟
Abstract
 EH-SurGS: Deformable Gaussian Splatting for Efficient and High-Fidelity Reconstruction of Surgical Scenes
EH-SurGS: Deformable Gaussian Splatting for Efficient and High-Fidelity Reconstruction of Surgical ScenesIntroduction¶
问题导向
现有方法在处理不可逆的动态变化(如组织剪切)以及缺乏手术场景变形的分层建模方面存在一定的局限性。
解决方案
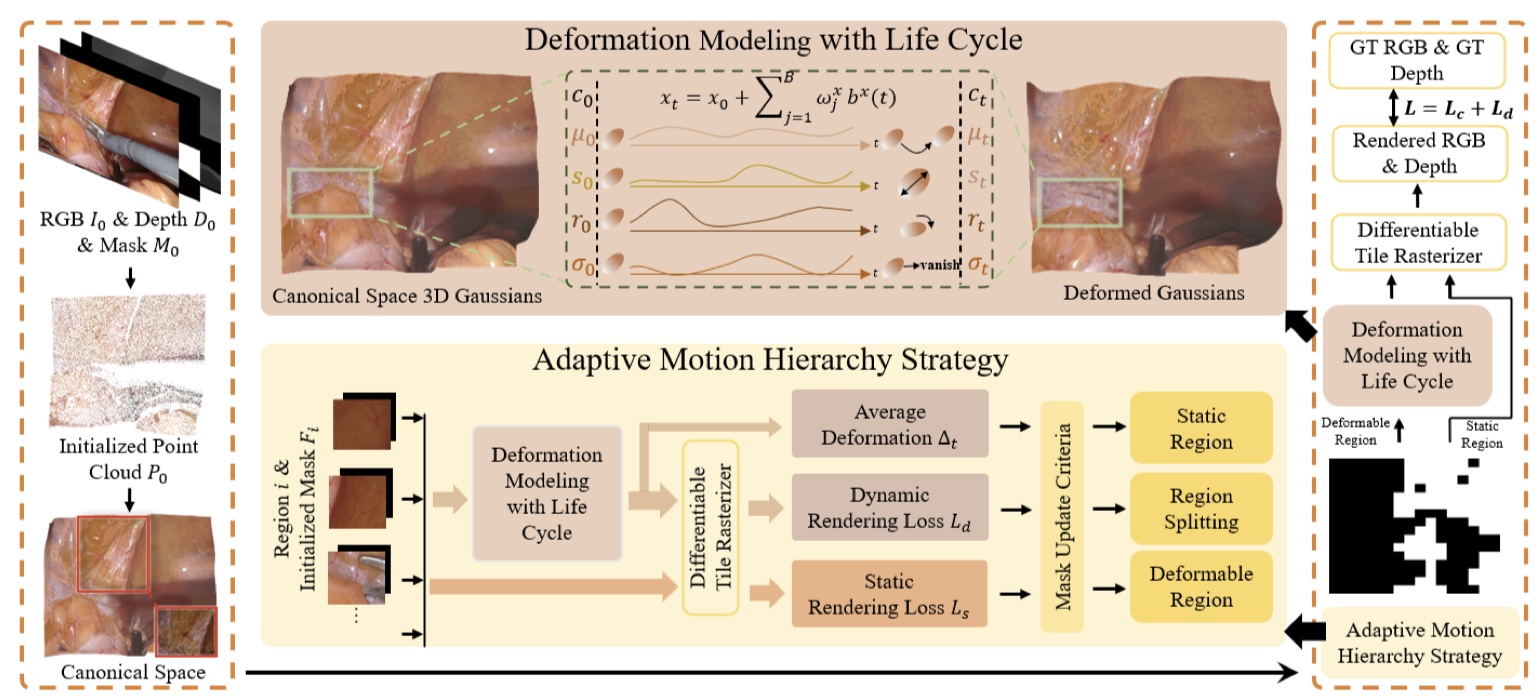
- 融合 3D Gaussians 生命周期的变形建模,有效捕捉常规变形和不可逆变形;
- 自适应运动层次策略,用于区分场景中的静态和可变性区域,减少通过变形场的 3D Gaussians 数量,提高渲染速度;

Method¶
Deformation Modeling with Life Cycle¶
场景中的剪切,现有方法通常会产生伪影。
- 使用可学习的高斯函数和权重来表示 3D Gaussians 的位置、旋转和尺度的变换,以此模拟变形,高斯函数为:\(b(t)=\exp\left(-\frac{1}{2\sigma^2}(t-\theta)^2\right)\),在时间点 \(t\) 处的变形表示为:\(x_t=x_0+\sum_{j=1}^B\omega_j^xb^x(t)\);
- 为了对每个 Gaussians 的生命周期建模,不透明度 \(\alpha\) 采用了与建模位置变换相同的方法:\(\alpha_t=\alpha_0+\sum_{j=1}^B\omega_j^\alpha b^\alpha(t)\);
Adaptive Motion Hierarchy Strategy¶
现有方法通常采用简单的变形渲染策略,无法区分场景中不同区域的运动尺度,导致渲染降低。
- 使用一个与图像分辨率相同的掩码 \(F \in R^{H \times W}\) 来区分可变性区域和静态区域,该掩码随着优化交替更新;
- Update criteria
- 可变性区域和静态区域从两个角度进行区分:平均形变和动态与静态渲染损失:
- 平均形变:规范空间的 Gaussian 经过形变建模模块后,计算每个区域所有 Gaussians 的位置变化,然后归一化、求和取平均,得到每个区域的平均形变 \(\Delta t\),如果超过设定的阈值 \(\delta_1=0.05\),则该区域被加入潜在动态区域集 \(Q\),否则放入潜在静态区域集 \(W\);
- 动态与静态渲染损失:对于同一损失,计算启用和不启用形变模块时的 Gaussians 渲染损失,分别为 \(L_d\) 和 \(L_s\),如果该区域是静态的,则 \(L_d\) 和 \(L_s\) 应保持一致(差值小于 \(\delta_2=0.5\)
) ,且该区域会被加入静态区域集 \(W^\prime\),相反,如果该区域是动态的,\(L_d\) 应远小于 \(L_s\),此时该区域会被加入动态区域集 \(Q^\prime\);
- Update process
- Initialization:将输入的 RGB 划分为 \(N \times N\) 个区域,每个区域 \(i\) 的掩码 \(F_i\) 初始化为动态 \(F_i=0\);
- Update the mask:当迭代次数达到阈值时,计算每个区域的平均形变 \(\delta_t,L_d,L_s\),根据更新标准更新每个区域的掩码,\(W\) 和 \(W^\prime\) 的交集更新为静态,\(Q\) 和 \(Q^\prime\) 的交集更新为动态;
- Region splatting:如果区域 \(q \in W\) 且 \(q \in Q^\prime\) 或 \(q \in Q\) 且 \(q \in W^\prime\),则该区域为冲突集合,需要切割,将原始区域均匀划分为四个动态区块,确保更细致的分隔;
- Update:根据模型的优化进度动态更新 \(N_m=N_m^{\prime}\times\mathrm{factor},\quad\mathrm{factor}=\frac{L_l}{L_c}\)。
Learning the Model¶
- 如果迭代达到掩码更新阈值 \(N_m\),就更新掩码 \(F\),否则由 \(F\) 确定哪些 3D Gaussians 分布需要通过可变性模型,然后进行渲染损失;
- 引入排序损失 \(L_{rank}\),\(L = L_c + L_D + \lambda \mathcal{L}_{rank}\)。