Endo-4DGS¶
约 966 个字 1 张图片 预计阅读时间 3 分钟
Abstract
 Endo-4DGS: Endoscopic Monocular Scene Reconstruction with 4D Gaussian Splatting
Endo-4DGS: Endoscopic Monocular Scene Reconstruction with 4D Gaussian SplattingIntroduction¶
问题导向
视野有限、遮挡和组织动态变形,以及 NeRF-based 方法速度慢,深度不一致等问题。
解决方案
4DGS 捕捉时间动态,Depth-Anything 生成伪深度图并作为几何先验;同时提出置信度引导学习,解决单目深度估计位姿估计不准确问题,并通过表面法向约束和深度正则化来增强深度引导的重建效果。
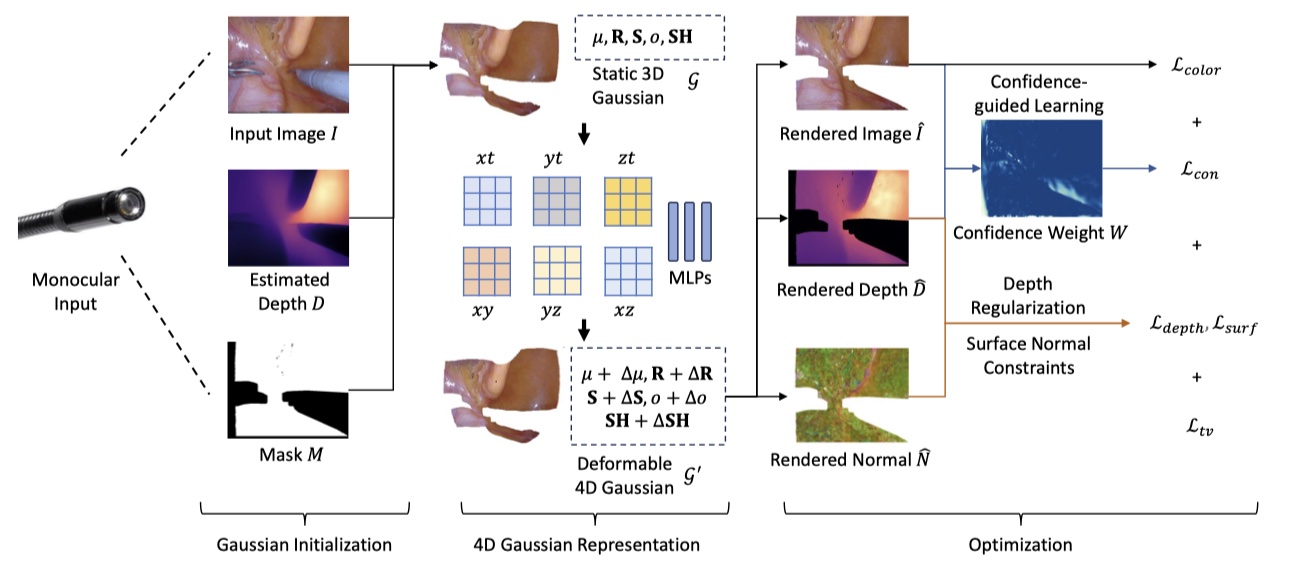
Method¶
4DGS for Deformable Scene Representation¶
- 用 4D Gaussian \(\mathcal{G}^\prime = \Delta \mathcal{G} + \mathcal{G}\) 表示可变性的手术场景,其中包括静态 3D Gaussian \(\mathcal{G}\) 以及变形 \(\Delta \mathcal{G} = \mathcal{F}(\mathcal{G}, t)\);
- 时空编码器 \(\mathcal{H}\) 由多分辨率六平面和一个小型 MLP 组成(K-Plane
) ,\(\mathcal{H}(\mathcal{G},t)=\{ R_l(i,j), \phi_d | (i,j) \in \{ (x,y),(x,z),(y,z),(x,t),(y,t),(z,t) \}, l \in \{1,2\} \}\),并且时空特征被编码为 \(f_d = (\mathcal{H}(\mathcal{G}, t))\); - 用一个 multi-head Gaussian deformation decoder \(\mathcal{D} = \{ \phi_\mu, \phi_r, \phi_s, \phi_o, \phi_{\mathbf{SH}} \}\),对五个参数进行解码,4D Gaussian 最终表示为:
\[
\begin{aligned}\mathcal{G}^{\prime}&=\{\mu+\phi_{\mu}(f_{d}),r+\phi_{r}(f_{d}),s+\phi_{s}(f_{d}),o+\phi_{o}(f_{d}),\mathbf{SH}+\phi_{\mathbf{SH}}(f_{d})\}\\&=\{\mu+\Delta\mu,\mathbf{R}+\Delta\mathbf{R},\mathbf{S}+\Delta\mathbf{S},o+\Delta o,\mathbf{SH}+\Delta\mathbf{SH}\}\end{aligned}
\]
Gaussians Initialization with Depth Prior¶
- 利用 Depth-Anything 实现 4D Gaussian 的点云初始化 ;
- 利用模型估计出逆深度图 \(D_{inv}\),然后应用缩放因子 \(\beta\) 来恢复相机坐标系下的深度图 \(D=\frac{\beta}{D_{inv}}\);
- 给定相机内参 \(K_1\) 和外参 \(K_2\),将大小为 \(N\) 的点云 \(P \in \mathbb{R}^{N \times 3}\) 从给定的图像 \(I\) 中投影:
\[
P = K_2^{-1} K_1^{-1} [(I \odot M), D]
\]
Confidence Guided Learning¶
- 由于无法获取真实的几何信息,基于估计深度的单目重建是一个不适定问题,所以构建一个概率模型来从 Depth-Anything 中学习深度的统计信息:
\[
\hat{D}=\frac{\sum_{i\in N}d_i\alpha_i\prod_{j=1}^{i-1}(1-\alpha_i)}{\sum_{i\in N}W_i},W_i=\alpha_i\prod_{j=1}^{i-1}(1-\alpha_i)
\]
- 置信引导损失,在可信度较低的深度和颜色进行惩罚的同时,还添加了 \(\log(\cdot)\) 作为正则项。置信权重会在渲染深度与深度先验不同的地方最大化误差,同时减少预训练深度估计中的不确定值的影响:
\[
\mathcal{L}_{con}=\mathbb{E}[\frac{1}{2W^2}||\hat{D}_{norm}-D_{norm}||_2^2+\log(W)]+\mathbb{E}[\frac{1}{2W^2}||\hat{C}-C||_2^2+\log(W)]
\]
Surface Normal Constraints and Depth Regularization¶
- 为了更有效地将预训练的深度图作为伪真值,提出使用深度正则化损失和表面法向量损失;
-
表面法向量损失:
- 用最短轴近似表面法向量 \(\hat{n}_i \in \hat{\mathbf{N}}\):
\[ \hat{\mathbf{n}}_\mathbf{i} = \mathbf{R}_i[r:], \quad r = \argmin([s_1, s_2, s_3]) \]- 计算深度先验的梯度 \(\bigtriangledown D = (G^W, G^H)\),其中 \(G^W, G^H\) 是沿深度图宽度和高度的梯度,并将伪表面法向量表示为:
\[ \mathbf{n}_i=\left [ \frac{G_i^W}{\sqrt{(G_i^W)^2+(G_i^H)^2+1}},\frac{G_i^H}{\sqrt{(G_i^W)^2+(G_i^H)^2+1}},\frac{1}{\sqrt{(G_i^W)^2+(G_i^H)^2+1}} \right ] \]- 表面法向量约束为 \(\mathcal{L}_{surf} = \| \mathbf{N} - \hat{\mathbf{N}} \|_1\)
-
深度正则化损失:
- 通过归一化深度损失和梯度损失来正则化 4D Gaussian 预测的深度:
\[ \mathcal{L}_{depth} = \lambda_{norm} \| D_{norm} - \hat{D}_{norm} \|_1 + \lambda_{grad} (1 - P_{corr}(\| \bigtriangledown D \|_2, \| \bigtriangledown \hat{D} \|_2)) \]- \(P_{corr}(\cdot)\) 是皮尔逊相关系数 ;
-
结合颜色损失 \(\mathcal{L}_{color}\) 和基于网格的总变分损失 \(\mathcal{L}_{tv}\),最终用于优化的损失函数为:
\[
\mathcal{L} = \mathcal{L}_{color} + \mathcal{L}_{tv} + \mathcal{L}_{depth} + \lambda_{surf} \mathcal{L}_{surf} + \lambda_{con} \mathcal{L}_{con}
\]