LGS¶
约 1070 个字 1 张图片 预计阅读时间 4 分钟
Abstract
 LGS: A Light-weight 4D Gaussian Splatting for Efficient Surgical Scene Reconstruction
LGS: A Light-weight 4D Gaussian Splatting for Efficient Surgical Scene ReconstructionIntroduction¶
问题导向
高维度的 Gaussian 属性和高分辨率的形变场,导致严重的存储问题。
解决方案
- 为最大限度减少高斯数量的冗余,评估每个高斯对形变的影响,提出形变感知剪枝方法(DAP
) ; 为降低高斯属性的冗余,通过对高斯属性的维度进行剪枝,简化非关键区域的纹理和光照表示(GAP); 通过 4D 特征场压缩,解决了用于动态场景建模的 4D 神经时空编码器因分辨率而导致的特征场冗余问题(FFC);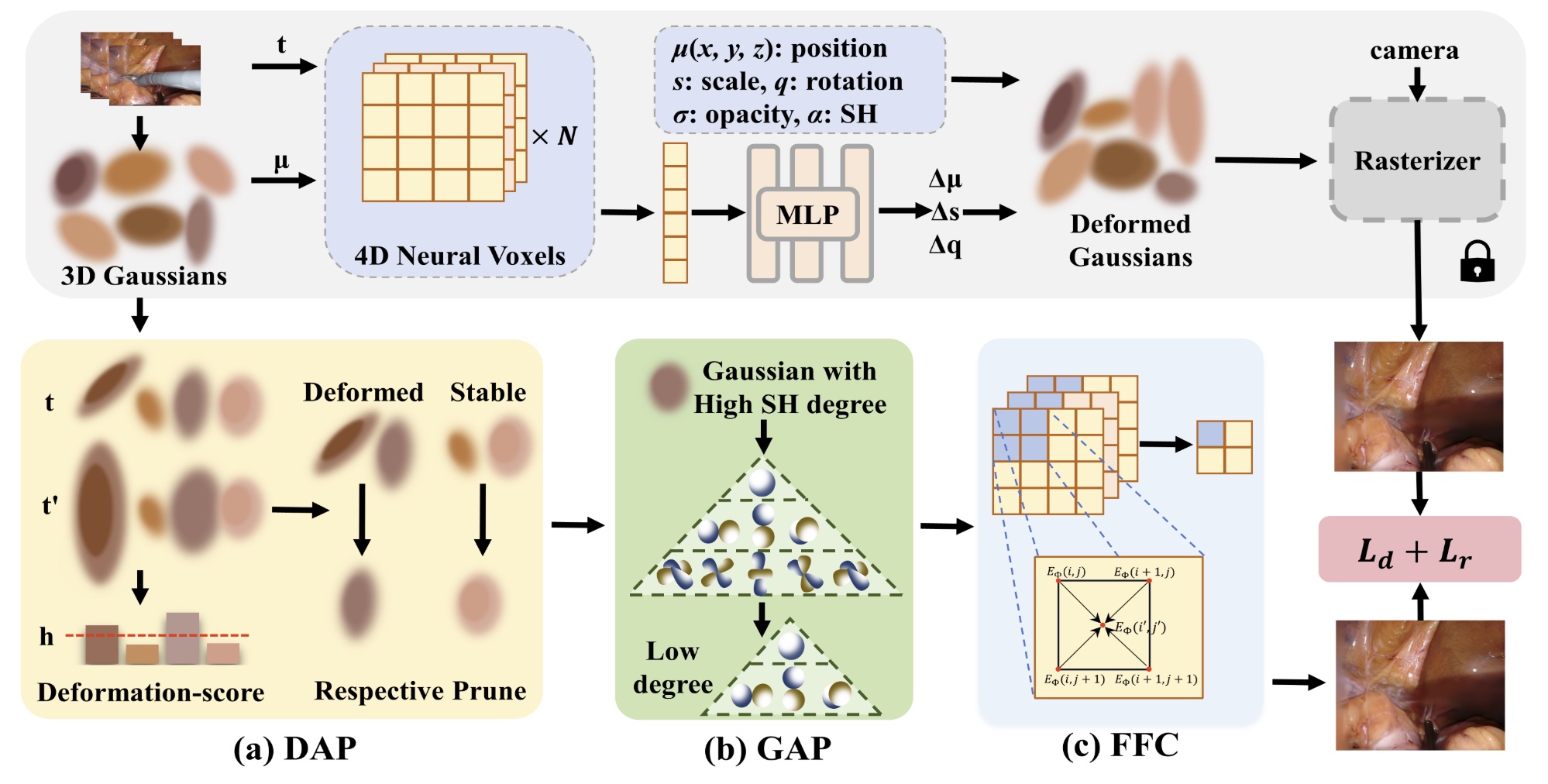
Method¶
Deformation-Aware Pruning (DAP)¶
DAP 目标
减少场景中冗余的 Gaussian 数量。
并非所有的 Gaussian 都对场景的形变建模有同等贡献。
-
Deformation Score
- 为每个 Gaussian 计算一个形变评分 \(d_i\),反映了该 Gaussian 在所有时间戳上对像素的贡献以及其自身的形变程度;
\[ d_i = \sum_{t}^T \sum_{k}^{HW} \mathbb{1}(G(X_i), p_k, t) \cdot \Delta V(s_i), \Delta V(s_i) = \sum_t^T \| V(s_i) - V(s_i + \Delta s_i) \|_1 \]- \(\mathbb{1}(G(X_i), p_k, t)\) 表示 i-th Gaussian 在时间 t 对像素 k 的贡献度,\(\Delta V(s_i)\) 表示 i-th Gaussian 的体积形变,通过缩放因子 \(s_i\) 和形变 \(\Delta s_i\) 计算体积的差。\(V(s)=4\pi s_1s_2s_3/3\) 是 Gaussian 的体积计算公式。
- 该分数表示,一个 Gaussian 对图像像素贡献越大,并且自身的体积形变越大,则它的形变评分越高,表明它对建模场景动态变化的重要性越高。
-
Gaussian
- stable Gaussian(SG
) :\(d_i \le h\); - deformed Gaussian(DG
) :\(d_i \gt h\);
- stable Gaussian(SG
-
Prune
- 分别对 SG 和 DG 分别进行剪枝,对每组 Gaussian 分别计算重要性得分:
- SG 基于不透明度和归一化体积计算;
- DG 基于原始体积及其形变计算;
- \(V_{norm}(s)=(V(s)/V_{max90})^\beta\) 为归一化的体积,\(V_{max90}\) 为所有排序后的高斯分布中 90% 的最大体积。然后相应地修剪重要性得分较低的高斯分布。
- 分别对 SG 和 DG 分别进行剪枝,对每组 Gaussian 分别计算重要性得分:
\[
IS_i=\begin{cases}\sum_t^T\sum_k^{HW}\mathbb{1}(G(\boldsymbol{X}_i),\boldsymbol{p}_k,t)\cdot\sigma_i\cdot V_{norm}(\boldsymbol{s}_{\boldsymbol{i}}),\quad i\in SG\\\sum_t^T\sum_k^{HW}\mathbb{1}(G(\boldsymbol{X}_i),\boldsymbol{p}_k,t)\cdot\Delta V(\boldsymbol{s})\cdot V_{norm}(\boldsymbol{s}_{\boldsymbol{i}}),\quad i\in DG&&\end{cases}
\]
Gaussian-Attribute Pruning (GAP)¶
GAP 目标
减少每个 Gaussian 的属性维度,尤其是 SH 的维度。
内窥镜场景的纹理和光照相对简单,不需要高纬度的 SH 系数来表示,通过移除高阶的 SH 系数,从而减少每个 Gaussian 的内存占用。
-
SH Prune
- SH 包含 48 个浮点值,占每个高斯所有属性的 80% 以上,因此 GAP 减少用于建模视角相关颜色和场景反射的高阶 SH;
- 使用一个阈值 \(h_{sh}\) 表示 SH 的剪枝程度,\(\alpha_{ic} = \alpha_{ic} * \mathbb{1}(c \le (h_{sh} + 1)^2 + N_{RGB}), c \in C\);
-
Knowledge Distillation:为弥补剪枝带来的信息损失,LGS 使用知识蒸馏技术。将为压缩的、训练良好的模型作为 teacher model,经过 DAP、GAP 和 FFC 处理后的模型作为 student model,通过最小化二者渲染图像之间的差异,将知识从 teacher 传递给 student,损失函数如下:
- \(L = L_d + L_r\)
- 蒸馏损失:\(L_d = \frac{1}{T} \sum_t^T \| \hat{I}_{tch}(t) - \hat{I}_{stu}(t) \|_2\)
- 渲染损失:\(L_r = \frac{1}{T} \sum_t^T \| I_{gt}(t) - \hat{I}_{stu}(t) \|_2\)
Feature Field Condensation (FFC)¶
FFC 目标
减少用于建模动态场景的 4D 特征场的内存占用。
FFC 通过对特征场进行自适应池化来减少其分辨率。
- 考虑到相邻的 Gaussian 通常共享相似的空间和时间信息,这意味着同一体素平面上的相邻值也应该相似,FCC 对 4D 特征场的各个子平面进行 3D 自适应池化:
\[
E_{\Phi}^{\prime}(i,j)=\frac{1}{r_{\Phi_1}r_{\Phi_2}}\sum_{i^{\prime}=i\cdot r_{\Phi_1}}^{(i+1)\cdot r_{\Phi_1}}\sum_{j^{\prime}=j\cdot r_{\Phi_2}}^{(j+1)\cdot r_{\Phi_2}}E_{\Phi}(i^{\prime},j^{\prime})
\]