DDN-SLAM¶
约 225 个字 1 张图片 预计阅读时间 1 分钟
Abstract
- paper:
 DDN-SLAM: Real-time Dense Dynamic Neural Implicit SLAM
DDN-SLAM: Real-time Dense Dynamic Neural Implicit SLAM - code: not open source
Idea¶
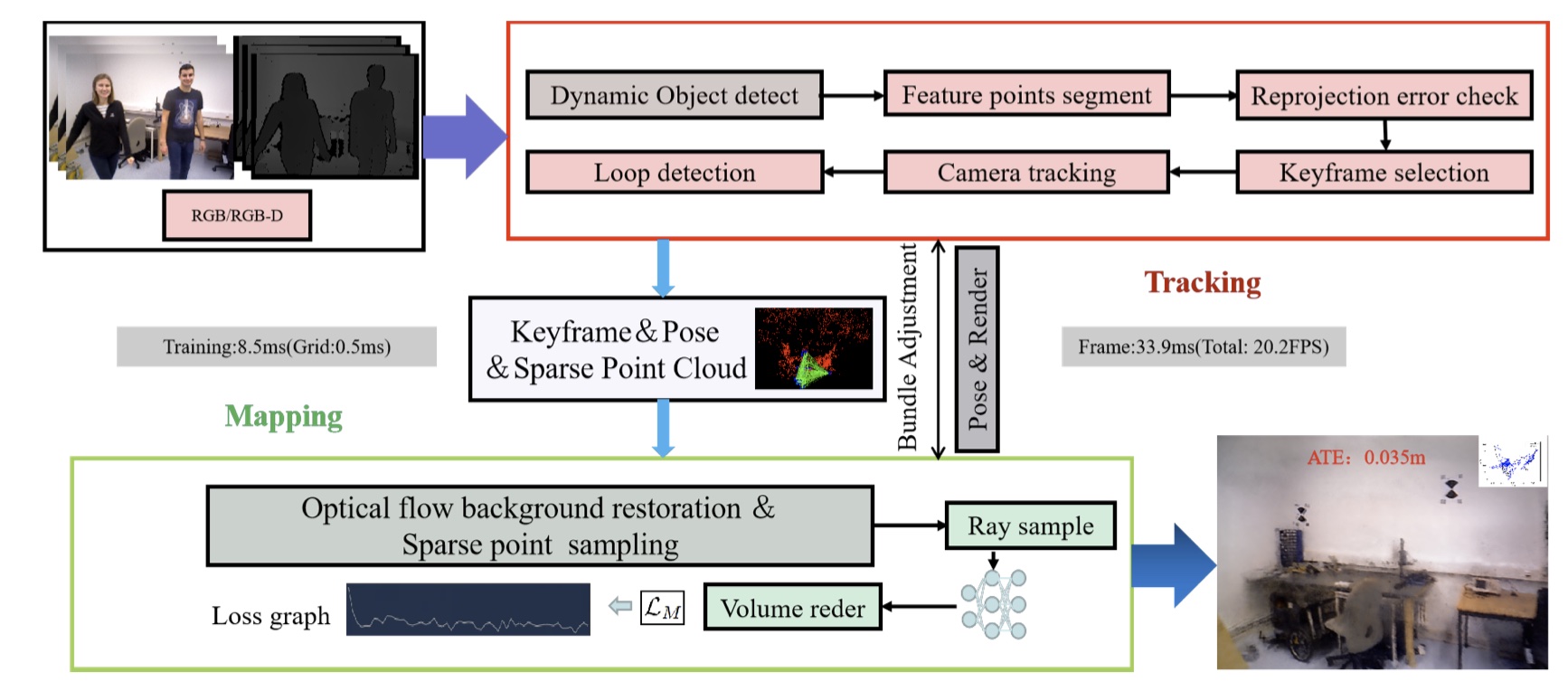
- 提出了基于语义特征的动态 SLAM,通过结合语义检测框架和高斯混合模型背景深度概率检查方法,区分前景和背景以消除干扰的动态特征点;
- 通过对动态点重投影误差的二次检查并 BA 来建立长期的数据关联;
- 提出一种混合的背景恢复和渲染策略,包括利用特征的光流来区分动态掩码以进行背景恢复;
- 提出一种由静态稀疏点云引导的采样策略,以增强对静态表面的重建;
- 提出一种基于动态掩码的渲染损失,包括运动一致性损失、深度损失和颜色损失,以约束动态物体的渲染鬼影并消除遮挡。
Experiments¶
无源代码。