最优化问题 ¶
Abstract
追求最优目标的数学问题都属于最优化问题。
作为最优化问题,至少有两个要素:第一个是可能的方案;第二个是追求的目标。
经典极值问题 ¶
在高数里的微积分中早以涉及到最简单的最优化问题,就是函数极值问题。
可以引申出两种经典最优化的两种类型问题。
无约束极值问题 ¶
这里的 \(f(x_1, x_2, ..., x_n)\) 是定义在 \(n\) 维空间上的可微函数。
求极值点方法:从如下的含有 \(n\) 个未知数 \(x_1, x_2, ..., x_n\) 的非线性方程组中解出驻点,然后判定或验证这些驻点是不是极值点:
具有等式约束的极值问题 ¶
求极值点方法:通常采用 \(Lagrange\) 乘子法来求解。即把这个问题转换为求 \(Lagrange\) 函数的无约束极值问题:
基本概念 ¶
向量表达法 ¶
将 \((x_1, x_2, ..., x_n)\) 看作是 \(n\) 维向量空间 \(R^n\) 中一个向量 \(\mathbf{x}\) 的 \(n\) 个分量,即 \(\mathbf{x} = (x_1, x_2, ..., x_n)^{\top}\)
所以重定义一下最优化问题:
-
无约束极值问题:
\[\min{f(\mathbf{x})}\] -
具有等式约束的极值问题:
\[ \min{f(\mathbf{x})} \\ s.t. \ \ \ \mathbf{h}(\mathbf{x}) = \mathbf{0} \\ 其中 \ \ \ \mathbf{h}(\mathbf{x}) = (h_1(\mathbf{x}), h_2(\mathbf{x}), ..., h_l(\mathbf{x}))^{\top} \]
一般形式 ¶
大部分所要讨论的问题是如下的(静态)最优化问题:
向量表示法写成:
这种问题称为非线性规划,比具有等式约束的极值问题仅多出 \(m\) 个不等式约束。但是,所谓经典问题与近代问题的界限也就在这里。
- 一些术语
- 满足所有约束的向量 \(\mathbf{x}\) 称为容许解或容许点。容许点的集合称为容许集。
- \(\mathbf{x}^*\) 称为问题的最优点,而相应的目标函数值 \(f(\mathbf{x}^*)\) 称为最优值,\((\mathbf{x}^*, f(\mathbf{x}^*))\) 称为最优解。
分类 ¶
二维问题的图解法 ¶
等值线 ¶
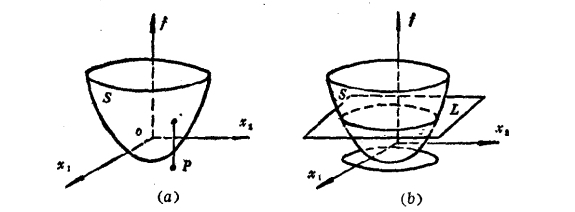
用平面 \(L\) 去截曲面 \(S\) 得到的是一个圆,这个圆又一个重要的性质:圆上任何一点的目标函数都等于 \(f_0\)。像这样的曲线,其上任何一点的目标函数值都等于同一常数,称为目标函数的等值线。
图解法
先画出目标函数的等值线,再画出约束曲线。实际上约束曲线是一条直线,这条直线就是容许集。因为最优点是容许集上使得等值线具有最小值的点,由下左图可以看出,约束直线与等值线(圆)的切点正是最优点。利用解析几何的有关方法可求的该点是 \(\mathbf{x}^x=(3,2)^{\top}\),它所对应的最优值是 \(f(\mathbf{x}^*)=2\)。
将无约束问题和约束问题的几何图形合在一起,如下右图所示。
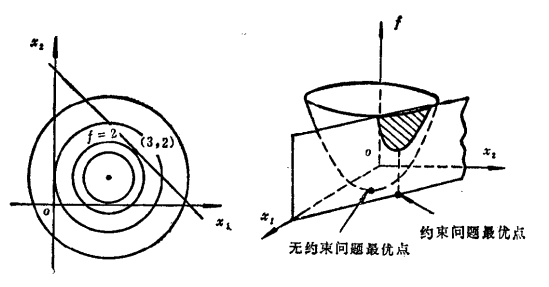
对于二维最优化问题,可以用图解法求解。
等值面 ¶
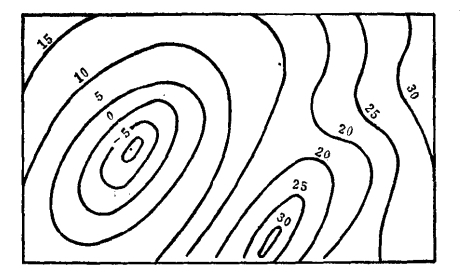
对于三维及以上的空间,使目标函数取同一常数值的点集 \(\{ \mathbf{x} | f(\mathbf{x})= \gamma , \gamma是常数 \}\) 称为等值面。具有一下性质:
- 有不同值的等值面之间不相交。
- 除里极值点所在的等值面以外,不会在区域的内部中断。
- 等值面稠密的地方,目标函数值变化得比较快;稀疏的地方变化得比较慢。
- 在极值点附近,等值面(线)近似地呈现为同心椭球面族。
二次函数 ¶
在 \(n\) 元目标函数中,除里线性函数,最简单最重要的一类就是二次函数。
- 一般形式是
- 矩阵形式是
这里 \(\mathbf{Q}\) 是对称矩阵(二次型
梯度与 Hesse 矩阵 ¶
梯度 ¶
定义 ¶
- 函数 \(f(\mathbf{x})\) 在 \(\mathbf{x}_0\) 处可微
- 若 \(f(\mathbf{x})\) 在 \(\mathbf{x}_0\) 处可微,则 \(f(\mathbf{x})\) 在该点关于各变量的一阶偏导数存在,并且
- 以 \(f(\mathbf{x})\) 的 \(n\) 个偏导数为分量的向量称为 \(f(\mathbf{x})\) 在 \(\mathbf{x}\) 处的梯度
性质 ¶
-
过点 \(\mathbf{x}_0\) 的等值面方程为 \(f(\mathbf{x}) = f(\mathbf{x}_0) 或 f(x_1, x_2, ..., x_n) = \gamma_0 \ \ \ 其中 \ \gamma_0 = f(\mathbf{x}_0)\)。
-
设 \(f: R^n \to R^1\) 在点 \(\mathbf{x}_0\) 处可微,\(\mathbf{p}\) 是固定不变的向量,\(\mathbf{e}\) 是方向 \(\mathbf{p}\) 上的单位向量,则称极限 \(\frac{\partial f(\mathbf{x}_0)}{\partial \mathbf{p}} = \lim_{t \to 0^+} \frac{f(\mathbf{x}_0+t\mathbf{e})-f(\mathbf{x}_0)}{t}\) 为函数 \(f(\mathbf{x})\) 在点 \(\mathbf{x}_0\) 处沿 \(\mathbf{p}\) 方向的方向导数。
-
设 \(f:R^n \to R^1\) 在点 \(\mathbf{x}_0\) 处可微,则 \(\frac{\partial f(\mathbf{x}_0)}{\partial \mathbf{p}} = \bigtriangledown f(\mathbf{x}_0)^{\top}\mathbf{e}\)。其中 \(\mathbf{e}\) 是 \(\mathbf{p}\) 方向上的单位向量。
特殊类型函数的梯度 ¶
- 若 \(f(\mathbf{x})=C\)( 常数 ),则 \(\bigtriangledown f(\mathbf{x})=\mathbf{0}\),即 \(\bigtriangledown C = \mathbf{0}\)
- \(\bigtriangledown (\mathbf{b}^{\top}\mathbf{x})=\mathbf{b}\)
- \(\bigtriangledown (\mathbf{x}^{\top}\mathbf{x})=2\mathbf{x}\)
- 若 \(\mathbf{Q}\) 是对称方阵,则 \(\bigtriangledown (\mathbf{x}^{\top}\mathbf{Q}\mathbf{x})=2\mathbf{Q}\mathbf{x}\)
Hesse 矩阵 ¶
多元函数 \(f(\mathbf{x})\) 的一阶导数是它的梯度 \(\bigtriangledown f(\mathbf{x})\),二阶导数是它的 Hesse 矩阵 \(\bigtriangledown^2f(\mathbf{x})\)。
-
常用公式:
- \(\bigtriangledown \mathbf{c}=\mathbf{O}\),其中 \(\mathbf{c}\) 是分量全为常数的 \(n\) 维向量,\(\mathbf{O}\) 是 \(n \times n\) 阶零矩阵。
- \(\bigtriangledown \mathbf{x} = \mathbf{I}\),其中 \(\mathbf{x}\) 是 \(n\) 维向量,\(\mathbf{I}\) 是 \(n \times n\) 阶单位矩阵。
- \(\bigtriangledown (\mathbf{Q}\mathbf{x})=\mathbf{Q}\),其中 \(\mathbf{Q}\) 是 \(n \times n\) 阶矩阵。
- 设 \(\varphi (t)=f(\mathbf{x}_0 + t\mathbf{p})\),其中 \(f:R^n \to R^1, \varphi: R^{\top} \to R^1\),则
\[ \varphi^\prime(t)=\bigtriangledown f(\mathbf{x}_0 + t\mathbf{p})^{\top}\mathbf{p} \\ \varphi^{\prime \prime}(t)=\mathbf{p}^{\top}\bigtriangledown^2f(\mathbf{x}_0+t\mathbf{p})\mathbf{p} \]
多元函数的 Taylor 展开式 ¶
设 \(f:R^n \to R^1\) 具有二阶连续偏导数,则
凸集与凸函数 ¶
凸集 ¶
- 设 \(x_1, x_2, ..., x_l\) 是 \(R^n\) 中的 \(l\) 个已知点。若对某点 \(x \in R^n\) 存在常数 \(a_1, a_2, ..., a_l \ge 0\) 且 \(\sum_{i=1}^la_i=1\) 使得 \(x=\sum_{i=1}^la_ix_i\),则称 \(x\) 是 \(x_1, x_2,...,x_l\) 的凸组合。若 \(a_1, a_2, ..., a_l > 0\) 且 \(\sum_{i=1}^la_i=1\),则称 \(x\) 是 \(x_1, x_2, ..., x_l\) 的严格凸组合。
- 设集合 \(C \subseteq R^n\),如果对于任意两点 \(x_1, x_2 \in C\),它们的任意凸组合仍然属于 C,那么称集合 C 为凸集。
- 设集合 \(\alpha \in R^n\) 且 \(\alpha \ne 0, b \in R^1\),则集合 \(\{x | \alpha^{\top}x=b,x \in R^n\}\) 称为 \(R^n\) 中的超平面,\(\alpha\) 称为这个超平面的法向量。
- 设集合 \(\alpha \in R^n\) 且 \(\alpha \ne 0, b \in R^1\),则集合 \(\{x | \alpha^{\top}x=b,x \in R^n\}\) 称为 \(R^n\) 中的半空间。
- 任意一组凸集的交仍然是凸集。
凸函数 ¶
- 设 \(f: C \subseteq R^n \to R^1\),其中 C 为凸集。若对于任意两点 \(x_1, x_2 \in C\) 和任意一对满足 \(\alpha_1 + \alpha_2 = 1\) 的数 \(\alpha_1, \alpha_2 \in [0,1]\) 都有 \(f(\alpha_1x_1+\alpha_2x_2) \le \alpha_1f(x_1)+\alpha_2f(x_2)\),则称 f 为定义在凸集 C 上的凸函数(严格小于时为严格凸函数)
- 若函数 f 在凸集 C 上是(严格)凸函数,则称 f 是定义在凸集 C 上的(严格)凸函数。
- 设 \(f: C \subset R^n \to R^1\),其中 C 为非空凸集。若 f 是凸函数,则对于任意实数 \(\beta\),水平集 \(D_\beta = \{x | f(x) \le \beta, x \in C\}\) 是凸集。
- 设 \(f: C \subseteq R^n \to R^1\),其中 C 是非空凸集,f 是凸函数,则形式为 \(\min f(x) \ s.t. \ x \in C\) 的问题称为凸规划。
- 设 \(x^\prime\) 是凸规划的局部极小点
- 若 f 是凸函数,则 \(x^\prime\) 是全局极小点
- 若 f 是严格凸函数,则 \(x^\prime\) 是唯一全局最小点
- 设 \(f:C \subseteq R^n \to R^1\) 是可微函数,其中 C 为凸集,则
- f 为凸函数的充要条件是,\(\forall x_1, x_2 \in C\) 都有 $f(x_2) \ge f(x_1) + \(\bigtriangledown f(x_1)^{\top}(x_2-x_1)\)
- f 是严格凸函数的充要条件是,\(\forall x_1, x_2 \in C\) 且 \(x_1 \ne x_2\) 都有 \(f(x_2) > f(x_1) + \bigtriangledown f(x_1)^{\top}(x_2-x_1)\)
- 设 \(f:C \subseteq R^n \to R^1\) 是二次可微函数,C 为非空开凸集,则 f 为 C 上凸函数的充要条件是, Hesse 矩阵 \(\bigtriangledown^2 f(x)\) 在 C 上到处半正定(满足半正定时,则 f 在 C 上为严格凸函数
) 。
极小点的判定条件 ¶
- 设 \(f:D \subseteq R^n \to R^1\) 具有连续的一阶偏导数。若 \(x^\prime\) 是 \(f(x)\) 的局部极小点并且是 D 的内点,则 \(\bigtriangledown f(x^\prime) = 0\)
- 设 \(f:D \subseteq R^n \to R^1\),\(x^\prime\) 是 D 的哪点。若 \(\bigtriangledown f(x^\prime) = 0\),则 \(x^\prime\) 称为 \(f(x)\) 的驻点。
- 设 \(f:D \subseteq R^n \to R^1\) 具有连续的二阶偏导数,\(x^\prime\) 是 D 的一个内点。若 \(\bigtriangledown f(x^\prime)=0\) 并且 \(\bigtriangledown^2 f(x^\prime)\) 是正定的,则 \(x^\prime\) 是 \(f(x)\) 的严格局部极小点。
下降迭代算法 ¶
给定初始点后,如果每迭代一步都使目标函数有所下降,即 \(f(\mathbf{x}_{k+1}) < f(\mathbf{x}_k)\),那这种迭代法称为下降法。
在迭代过程中有两个规则需要确定,一个是下降方向 \(\mathbf{p}_k\) 的选取;一个是步长因子 \(t_k\) 的选取。
算法的基本格式如下:
- 选取初始点 \(\mathbf{x}_0\),置 \(k=0\)
- 按某种规则确定 \(\mathbf{p}_k\) 使得 \(\bigtriangledown f(\mathbf{x}_k)^{\top} \mathbf{p}_k < 0\)
- 按某种规则确定 \(t_k\) 使得 \(f(\mathbf{x}_k+t_k\mathbf{p}_k)<f(\mathbf{x}_k)\)
- 计算 \(\mathbf{x}_{k+1}=\mathbf{x}_k+t_k\mathbf{p}_k\)
- 判定 \(\mathbf{x}_{k+1}\) 时候满足终止准则,若满足,打印 \(\mathbf{x}_{k+1}\) 和 \(f(\mathbf{x}_{k+1})\),停机;否则置 \(k=k+1\),转 2